Pünktlich zur Hamvention 2026 hat ICOM ein Vorstellungsvideo zum neuen ID-5200 VHF/UHF-Mobiltransceiver veröffentlicht. Wir fassen die wichtigsten bisher bekannten Informationen und Neuerungen für euch zusammen.
Bereits im August letzten Jahres hatten wir über ICOMs neuen Dualband-Mobiltransceiver berichtet. Pünktlich zur Hamvention 2026 wurden nun weitere Details bekannt und erstmals ein offizielles Vorstellungsvideo veröffentlicht. Unseren vorherigen Beitrag zum ID-5200 findet ihr hier:
Bevor wir euch das Video und die darin genannten Funktionen kurz zusammenfassen, gleich vorab die wohl wichtigste Neuerung.
Erstmals analoges APRS bei ICOM
Erstmals bei einem ICOM-Mobiltransceiver soll künftig auch analoges APRS unterstützt werden. Während analoges APRS bei anderen Herstellern längst zum Standard gehört, hatte sich ICOM bislang konsequent auf D-PRS innerhalb des D-STAR-Ökosystems beschränkt und auf die Integration von APRS verzichtet.
Woher der plötzliche Sinneswandel kommt, darüber können wir aktuell nur spekulieren. Wir gehen jedoch davon aus, dass der ebenfalls angekündigte Kenwood TM-D750 dabei eine Rolle spielen könnte. Dieser bietet nämlich ebenfalls D-STAR sowie analoges APRS und richtet sich damit offenbar an die gleiche Zielgruppe.
Wichtig dabei: Die APRS-Funktion soll laut ICOM nicht direkt zum Verkaufsstart verfügbar sein, sondern erst später per kostenlosem Firmware-Update nachgereicht werden.
Weiterer Funktionsumfang
In dem rund acht Minuten langen Video, das sowohl in englischer als auch japanischer Sprache verfügbar ist, geht ICOM ausführlich auf den Funktionsumfang des neuen Mobilgerätes ein.
Zu den wichtigsten bislang bekannten Funktionen gehören unter anderem:
4,3 Zoll großes Farb-Touchdisplay
Bandscope und Wasserfall-Darstellung
Gleichzeitiger Dual-Empfang (auch DV/DV), besonders interessant für den Betrieb über Amateurfunksatelliten
Integriertes WLAN und Bluetooth
Terminal- und Access-Point-Mode
DV-Repeater-Monitor
Integrierter GNSS-Empfänger
Airband-Empfang
USB-C-Anschluss
microSD-Kartenslot
Bildübertragung direkt über das Funkgerät
Umfangreiche Speicher- und Scanfunktionen
ICOM bleibt dem bereits vom ID-5100 bekannten Bedienkonzept weitgehend treu, modernisiert jedoch die Benutzeroberfläche deutlich.
Das entsprechende Video findet ihr hier:
Verfügbarkeit und Preis
Ab wann der neue Mobiltransceiver hierzulande verfügbar sein wird und zu welchem Preis er angeboten werden soll, stand zum Zeitpunkt der Veröffentlichung dieses Beitrages noch nicht fest. Sobald wir hierzu weitere Informationen haben, voraussichtlich zur diesjährigen Tokyo Ham Fair im August, werden wir natürlich darüber berichten.
Fazit
Spannend dürfte vor allem werden, wann Kenwood und ICOM ihre neuen Geräte tatsächlich veröffentlichen und wie sich beide Mobiltransceiver im direkten Vergleich schlagen werden. Sowohl optisch als auch beim Funktionsumfang und vermutlich auch preislich scheinen sich beide Geräte in eine sehr ähnliche Richtung zu bewegen.
Interessiert euch eines der Geräte? Welche Funktionen würdet ihr euch zusätzlich noch wünschen? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
MeshCore erweitert das Konzept von Meshtastic um intelligentes Routing und hohe Effizienz. Wir haben uns das Projekt für euch genauer angeschaut.
Einführung: Was ist MeshCore
Im Kern verfolgt MeshCore dieselben Ziele wie das bekannte Meshtastic-Projekt: eine offene, quellbasierte und verschlüsselte (AES‑256‑GCM oder ChaCha20‑Poly1305) Kommunikationsplattform, die auf LoRa-Technologie basiert und vollständig unabhängig von Internet, Mobilfunk und WLAN funktioniert.
Zum Einsatz kommen dabei kostengünstige LoRa-Geräte, die vielfach bereits im Umfeld von Meshtastic oder MeshCom verwendet werden. Wer also schon Hardware für diese Systeme besitzt, hat gute Chancen, dass sie auch kompatibel mit MeshCore ist.
MeshCore unterstützt eine ganze Reihe von LoRa-Hardware wie z.B. das LilyGo LoRa32 V2.1
Unterschiede zu Meshtastic
Während bei Meshtastic alle Nodes in festen Abständen Broadcast-Nachrichten aussenden, um ihre Existenz im Netzwerk zu signalisieren, geht MeshCore einen effizienteren Weg: Hier muss der Nutzer seine Node aktiv durch das Senden einer „Advert“ im Netzwerk bekannt machen. Das mag zunächst nach einem zusätzlichen Schritt klingen, bringt aber gerade in großen Mesh-Netzwerken erhebliche Vorteile: Die verfügbare On-Air-Zeit wird nicht durch ständige Broadcasts belegt, sondern gezielt für tatsächliche Nachrichtenübertragung genutzt.
Statt nur die LoRa-Funkschnittstelle für die Nachrichtenweiterleitung zu verwenden unterstützt MeshCore gleich mehrere Transportarten: Darunter LoRa, Bluetooth (BLE), Wi‑Fi, serielle Verbindungen und UDP, und bietet damit eine deutlich größere Auswahl an kompatiblen Geräten. Dadurch kann das System flexibel auf unterschiedliche Einsatzszenarien zugeschnitten werden.
Der wohl entscheidendste Unterschied liegt jedoch im Routing-Verhalten: MeshCore merkt sich den effizientesten Übertragungsweg zwischen zwei Stationen und nutzt diesen für alle weiteren Nachrichten.
Ein Beispiel:
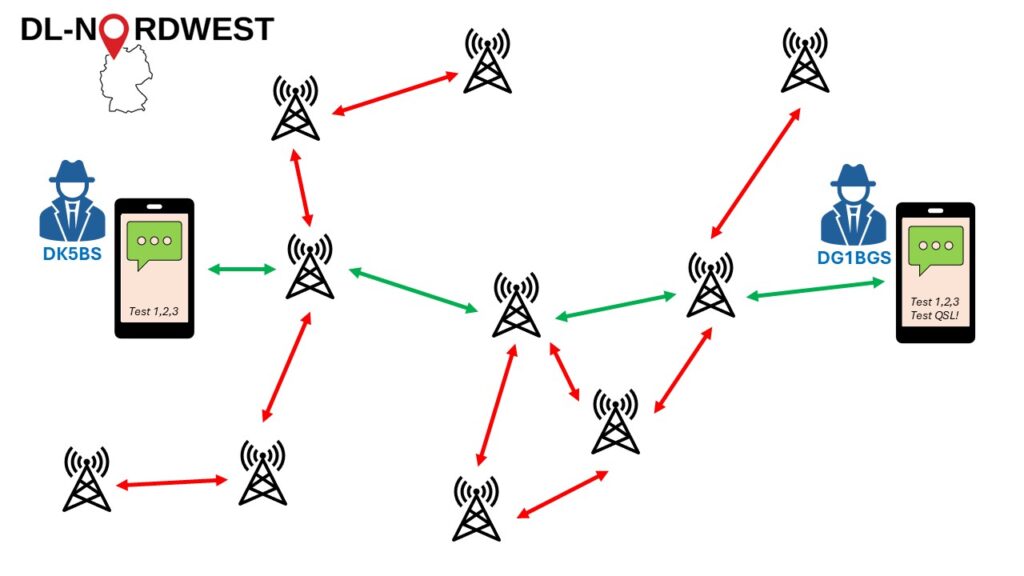
Wenn Bernd DK5BS eine Nachricht an Stephan DG1BGS sendet, wird sie zunächst per Flood Routing ausgesendet. Jede Station (Repeater oder Nodes mit aktivierter Routing-Funktion), die Bernd erreichen kann, wiederholt die Nachricht, bis Stephans Node erreicht ist. Dieser erste Austausch erzeugt zwar kurzzeitig viel Funkverkehr, hat aber einen entscheidenden Lerneffekt: Alle beteiligten Repeater speichern, über welchen Pfad die Nachricht am effizientesten übertragen wurde und geben die Information der effizientesten Route an Stephans Node weiter.
Wenn Stephan anschließend antwortet, nutzt seine Nachricht diesen optimierten Rückweg. Ab diesem Zeitpunkt läuft die Kommunikation zwischen beiden direkt über den kürzesten Pfad, was das Mesh-Netz deutlich entlastet und die Übertragung deutlich zuverlässiger macht.
Verändert sich das Netzwerk, etwa, weil eine Node ausfällt oder sich die Topologie ändert, reagiert MeshCore automatisch: Wird eine Nachricht dreimal erfolglos über den gespeicherten Pfad gesendet, wechselt das System wieder in den Flood-Modus, um einen neuen, funktionierenden Pfad zu ermitteln. So bleibt das Netzwerk auch bei wechselnden Bedingungen zuverlässig verbunden.
Das MeshCore-Netzwerk merkt sich den optimalen Pfad zwischen Teilnehmern
Ein zusätzliches Feature ist die Möglichkeit, bekannte direkte Pfade manuell in der App zu hinterlegen. So kann gezielt festgelegt werden, über welchen Weg Nachrichten zwischen bestimmten Nodes laufen sollen. Das ist vor allem in stationären Setups nützlich.
Was man braucht, um an MeshCore teilzunehmen
Wie bei Meshtastic oder MeshCom startet auch die Nutzung von MeshCore mit der passenden Hardware: Zunächst benötigt ihr ein kompatibles LoRa-Gerät. Bezugsquellen:
Auf dieses wird anschließend die MeshCore-Firmware geflasht. Über die offizielle Flash-Oberfläche unter https://flasher.meshcore.co.uk (kompatiblen Browser wie Chrome verwenden) lässt sich dies schnell und unkompliziert durchführen.
MeshCore Web-Flasher
Rollen der Nodes
Ein wesentlicher Unterschied zu anderen Mesh-Systemen wie Meshtastic oder MeshCom besteht darin, dass man sich bereits vor dem Flashen überlegen sollte, welche Rolle die Node übernehmen soll.
Derzeit stehen vier Typen zur Verfügung:
Companion Bluetooth: Verbindung über Bluetooth, typischerweise für mobile Geräte gedacht.
Companion USB: Ähnlich wie Bluetooth, jedoch über eine direkte USB-Verbindung, z. B. für PC-Anwendungen.
Repeater: Klassische Weiterleitungs-Node, die Nachrichten zwischen anderen Stationen überträgt.
Room Server: Vergleichbar mit einem kleinen Bulletin Board System (BBS), auf dem Nutzer Nachrichten hinterlegen und die Mitteilungen anderer lesen können.
Diese klare Rollenverteilung macht MeshCore besonders strukturiert und ermöglicht gezielte Netzwerkkonfigurationen – vom einfachen Zwei-Node-Setup bis hin zu großflächigen, mehrstufigen Mesh-Netzen.
Nachdem man die passende Rolle gewählt hat, verbindet man sich mit der MeshCore-App (verfügbar für Android und iOS) via Bluetooth mit der frisch geflashten Node. Und schon seid ihr Teil des MeshCore-Netzwerks.
Hinweis für Funkamateure
Die Nachrichtenübertragung bei MeshCore erfolgt standardmäßig verschlüsselt, was im Amateurfunk nicht zulässig ist. Im Gegensatz zu Meshtastic gibt es bei MeshCore derzeit keinen Schalter, mit dem Funkamateure die Verschlüsselung deaktivieren und ggf. die Sendeleistung erhöhen könnten.
Ihr könnt eure MeshCore-Node jedoch im ISM-Band betreiben und dabei die dort im gewählten Frequenzbereich maximal zulässige Sendeleistung nutzen.
Fazit
MeshCore bietet eine offene, verschlüsselte Kommunikationsplattform über LoRa, die unabhängig von Internet, Mobilfunk oder WLAN funktioniert. Durch intelligentes Routing werden Nachrichten effizient im Netzwerk verteilt, was insbesondere in großen Mesh-Strukturen Vorteile bringt. Wer bereits Meshtastic kennt, findet bei MeshCore zusätzliche Flexibilität und optimierte Netzwerkpfade.
Statt wie Meshtastic auf die Optimierung für sich schnell ändernde, dynamische Netzwerke zu setzen, fokussiert sich MeshCore auf geplante oder semi-statische Netzwerke und ist damit ideal für stationäre Installationen, Community-Netze oder größere Mesh-Infrastrukturen, bei denen Stabilität und effiziente Pfadnutzung im Vordergrund stehen.
Auch in DL-Nordwest befasst man sich bereits mit MeshCore. Derzeit laufen Überlegungen, parallel zu dem bereits auf 433 MHz Amateurfunk-Meshtastic-Netz ein MeshCore-Netz auf 868 MHz aufzubauen, das dann auch der Bevölkerung zugutekommen könnte.
Weitere Informationen zu MeshCore findet ihr auf den folgenden Webseiten:
Offizielle MeshCore Webseite
MeshCoreNetz.de – Kommunikation ohne Netz
Seid ihr bereits in einem Mesh-Netzwerk aktiv? Und habt ihr vielleicht sogar MeshCore schon einmal getestet? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Dieser Beitrag enthält Affiliate-Links. Wenn ihr über diese Links etwas bestellt, erhalten wir ggf. eine kleine Provision. Für euch entstehen dadurch keine zusätzlichen Kosten. Damit unterstützt ihr den Betrieb von DL-Nordwest.
Hier findet ihr weitere Beiträge zu LoRa Datenfunk:
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Python-basierter TUI-Client zum Austausch von Nachrichten und Konfigurieren von Meshtastic-Nodes.
Neulich haben wir euch bereits die Software Connect von Benjamin K1PDX vorgestellt. Auf seiner GitHub-Seite pdxlocations finden sich weitere praktische Tools rund um Meshtastic – alle in Python geschrieben und definitiv einen Blick wert.
Für die Konfiguration eines Meshtastic-Nodes an einem entfernten Standort, der per serieller Verbindung an einen Raspberry Pi angeschlossen ist, habe ich bisher die Meshtastic-CLI verwendet. Diese erfordert jedoch die Eingabe teils sehr langer Befehle über die Kommandozeile – das ist nicht nur zeitaufwändig, sondern auch anfällig für Tippfehler. Die integrierte UI der Meshtastic-CLI konnte ich nicht nutzen, da der Raspberry Pi keine grafische Oberfläche installiert hat.
Mit Contact steht eine Software zur Verfügung, die eine textbasierte Benutzeroberfläche direkt im Terminal bietet. Die Konfiguration einer verbundenen Meshtastic-Node erfolgt bequem über Menüs – ähnlich wie in den Meshtastic-Apps für Smartphones.
Doch Contact kann mehr: Neben der Geräteeinrichtung lassen sich auch Nachrichten anzeigen und versenden – sowohl an Kanäle als auch als Direktnachrichten an einzelne Nodes im Mesh.
GitHub-Seite von Contact
Installation
Contact steht bereits als Paket über pip zur Verfügung, was die Installation besonders einfach macht. Wenn Python 3 und pip bereits auf eurem System vorhanden sind, könnt ihr Meshtastic und Contact mit folgendem Befehl installieren:
pip install meshtastic contact
Bei Betriebssystemen, auf denen Python auch für systemkritische Aufgaben verwendet wird (z. B. bei vielen Linux-Distributionen), ist es empfehlenswert – teils sogar notwendig – Meshtastic und Contact in einer virtuellen Umgebung zu installieren. Führt dazu zunächst die folgenden Befehle aus, bevor ihr pip install verwendet:
python3 -m venv venv
source venv/bin/activate
Aufruf und Nachrichtenversand
Contact kann sich mit eurer Meshtastic-Node entweder über eine serielle Verbindung, per Bluetooth oder via IP-Netzwerk verbinden. Die gewünschte Option gebt ihr einfach beim Starten des Programms mit an – zum Beispiel:
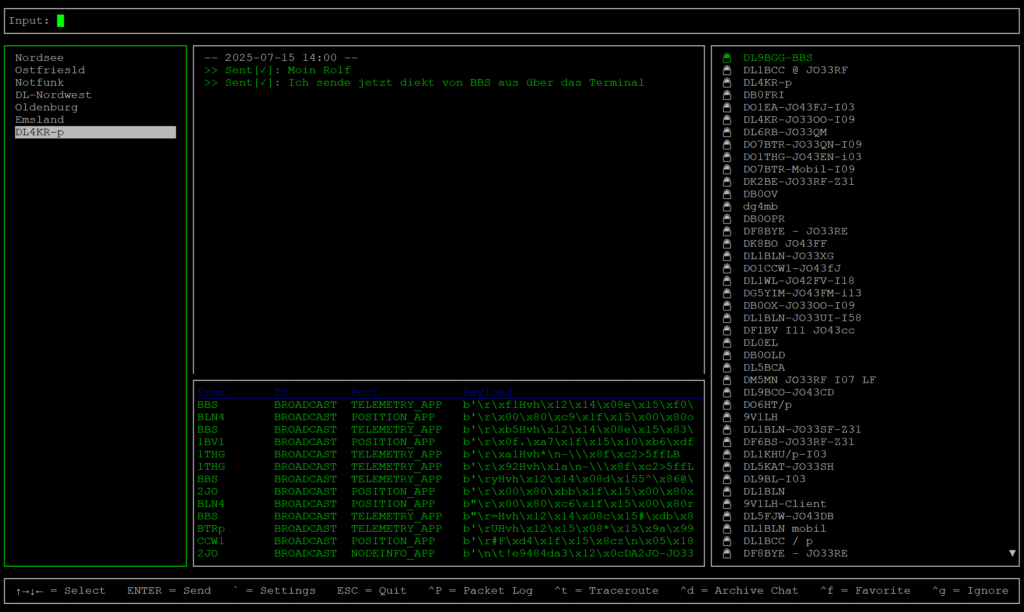
Im Hauptfenster von Contact werden die konfigurierten Kanäle, das Nachrichtenempfangsfenster sowie die verbundenen Nodes übersichtlich dargestellt. Bei Bedarf kann zusätzlich das Paket-Log eingeblendet werden.
Die Navigation innerhalb der Terminal-Oberfläche erfolgt über die Pfeiltasten eurer Tastatur.
Um eine Nachricht in einem bestimmten Kanal zu senden, markiert zunächst im linken Bereich den gewünschten Kanal. Anschließend gebt ihr eure Nachricht im oberen Bereich unter Input ein und bestätigt sie mit der Enter-Taste.
Um eine Direktnachricht an eine andere Node zu versenden, navigiert mit den Pfeiltasten zunächst in den rechten Bildschirmbereich und wählt dort die gewünschte Node aus. Mit Enter markiert ihr sie – sie erscheint daraufhin auch im linken Bereich der Kanalübersicht und ist dort automatisch aktiviert. Gebt nun wie gewohnt eure Nachricht im Input-Feld ein und sendet sie mit der Enter-Taste.
Hier wurde eine direkte Nachricht an die Node DL4KR-p versendet.
Konfiguration
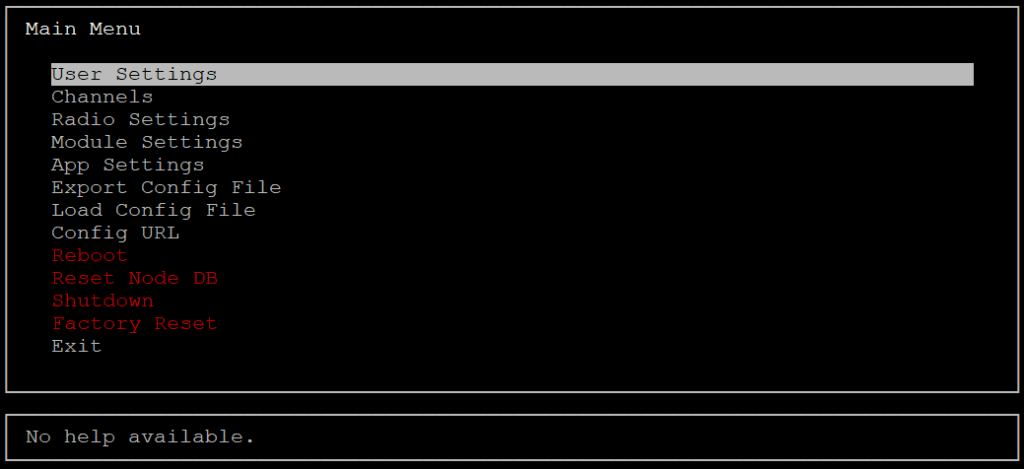
Um eure Node zu konfigurieren, öffnet ihr das Konfigurationsmenü mit der Backtick-Taste auf eurer Tastatur. Wenn ihr eure Node bereits mit der Android- oder iOS-App konfiguriert habt, werdet ihr euch in der Menüstruktur von Contact schnell zurechtfinden.
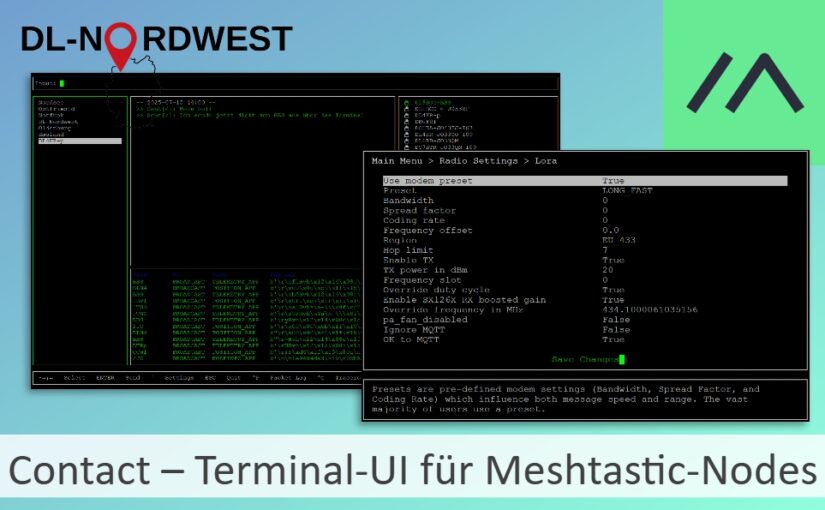
Hauptmenü von Contact: Von hier aus lässt sich die verbundene Node komfortabel konfigurieren und fernsteuern.
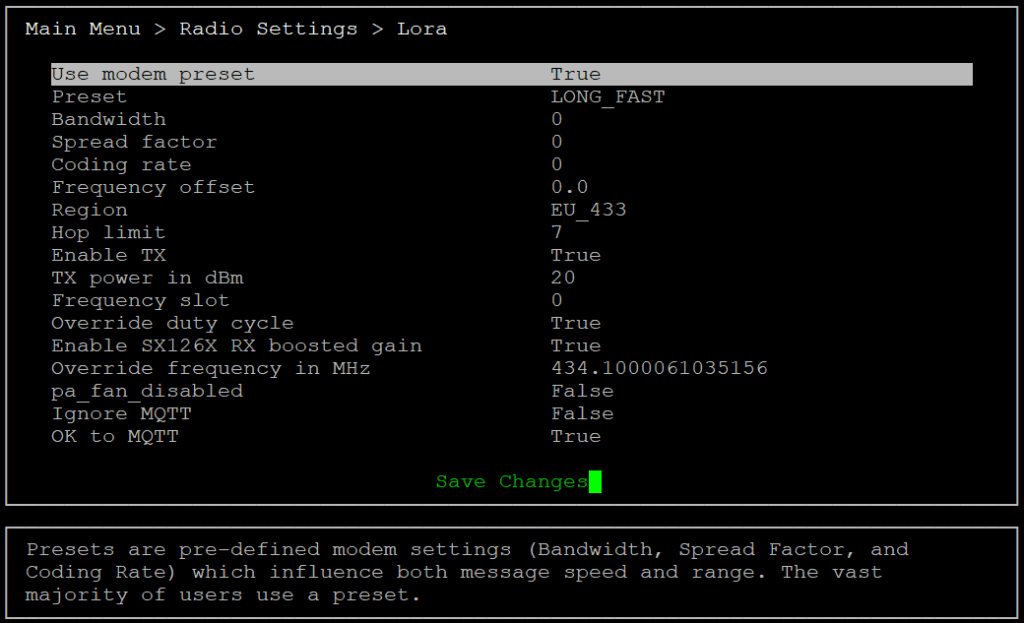
Zu fast jedem Konfigurationsparameter zeigt Contact im unteren Bereich des Bildschirms eine kurze Erklärung sowie den Standardwert an.
Konfigurationsmenü für die LoRa-Radioeinstellungen: Im unteren Bildschirmbereich zeigt Contact eine kontextabhängige Hilfe zur jeweils ausgewählten Konfigurationsoption.
Fazit
Für meinen Einsatzzweck – die Fernkonfiguration eines Nodes über einen headless Raspberry Pi – ist Contact genau das, was ich gebraucht habe. Endlich keine langen Kommandozeilen-Befehle mehr, sondern eine übersichtliche Menüoberfläche direkt im Terminal. Eine klare Empfehlung! 😊
Kennt ihr weitere Meshtastic-Software, die nicht unerwähnt bleiben sollte? Dann schreibt sie uns gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
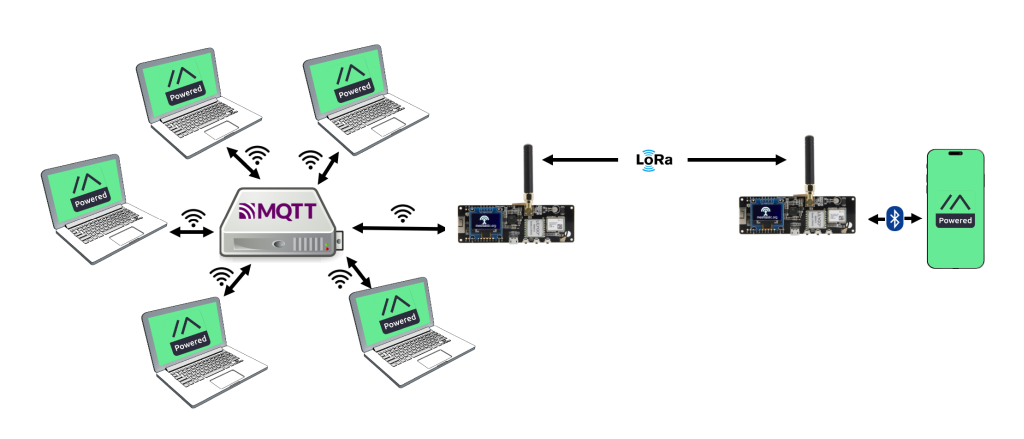
Benjamin K1PDX stellt auf seiner GitHub-Seite pdxlocations eine Reihe interessanter Projekte rund um Meshtastic vor, die alle in Python realisiert wurden. Eines davon ist Connect – ein Chat-Client für Meshtastic-Netzwerke. Im Gegensatz zu anderen Anwendungen wie MeshSense, die eine direkte Verbindung zu einer Meshtastic-Node erfordern, kommt Connect vollständig ohne eigene Node aus. Eine oder mehrere Nodes des Netzwerks dienen dabei als Gateway, um Nachrichten via Funk auszusenden und zu empfangen.
Connect-Clients kommunizieren über MQTT Broker, Quelle: github.com/pdxlocations/connect
Installation
Die Installation unter macOS und Linux-basierten Betriebssystemen ist auf der GitHub-Seite des Projekts dokumentiert. Unter Linux können die Befehle einfach in ein Terminalfenster kopiert und ausgeführt werden. Wechselt zuvor mit dem Befehl cd in das gewünschte Installationsverzeichnis, z. B. cd ~ für euer Homeverzeichnis. Achtet darauf, dass euer Benutzer in diesem Verzeichnis über Schreibrechte verfügt. Falls nötig, können diese mit dem Befehl sudo chown angepasst werden.
Für einen komfortablen Start der Software empfiehlt es sich, eine entsprechende Verknüpfung auf dem Desktop abzulegen. Auf Raspbian-basierten Systemen kann dies im Verzeichnis /home/pi/Desktop erfolgen. Ein automatischer Start beim Systemstart ist ebenfalls möglich, indem man einen symbolischen Link der erstellten Desktop-Datei im Verzeichnis /home/pi/.config/autostart ablegt.
Anleitung auf der Projektseite von Connect
Konfiguration
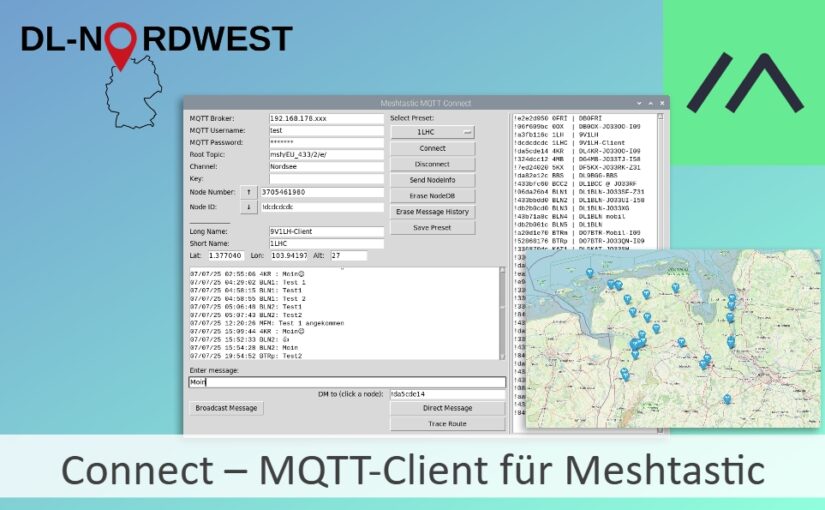
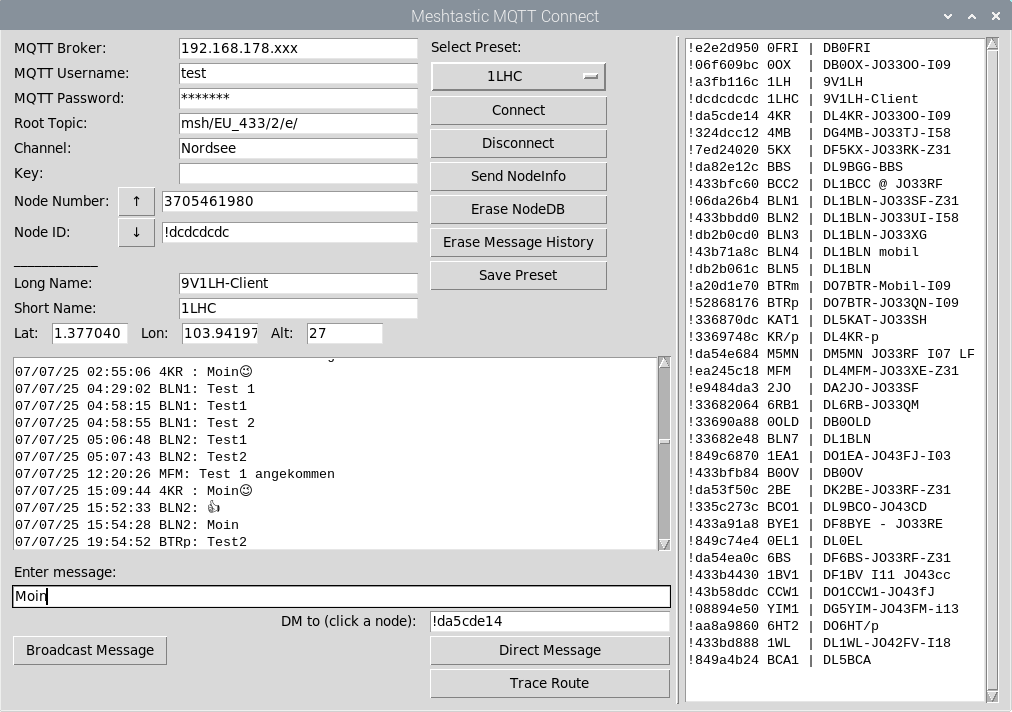
Wie bei einer „echten“ Node wird auch hier zunächst eine im Netzwerk eindeutige Node-ID im hexadezimalen Format vergeben, z. B. !dcdcdcdc. Zusätzlich müssen ein Long- und Short-Name, eine statische Position (Breiten- und Längengrad) sowie die Höhe angegeben werden. Diese Angaben – ebenso wie die Konfiguration des zu verwendenden MQTT-Servers und die Login-Daten – lassen sich bequem über die grafische Benutzeroberfläche der Software eintragen und als Profile speichern. Nach dem Start kann eines der zuvor angelegten Profile ausgewählt und verwendet werden.
Hauptfenster der Anwendung Connect
Nachrichtenversand
Nach erfolgreicher Verbindung zum konfigurierten MQTT-Server sendet die Software in regelmäßigen Abständen automatisch die eigene Node-Info samt Position. Kurz darauf erscheinen im rechten Bereich der Benutzeroberfläche die ersten über MQTT empfangenen Nodes – inklusive ihrer ID sowie ihres Short- und Long-Names. Statusmeldungen der Software sowie empfangene Kanal- und Direktnachrichten werden in einem Fenster unterhalb der Konfiguration angezeigt.
Darunter befindet sich ein Texteingabefeld und ein mit „Broadcast“ beschrifteter Button, über den eigene Nachrichten an den unter „Channel“ definierten Kanal gesendet werden können. Klickt man auf eine Node in der Liste, wird deren ID automatisch in das Feld „DM to“ übernommen. Mit dem Button „Direct Message“ lässt sich anschließend gezielt eine Nachricht an diese Node senden.
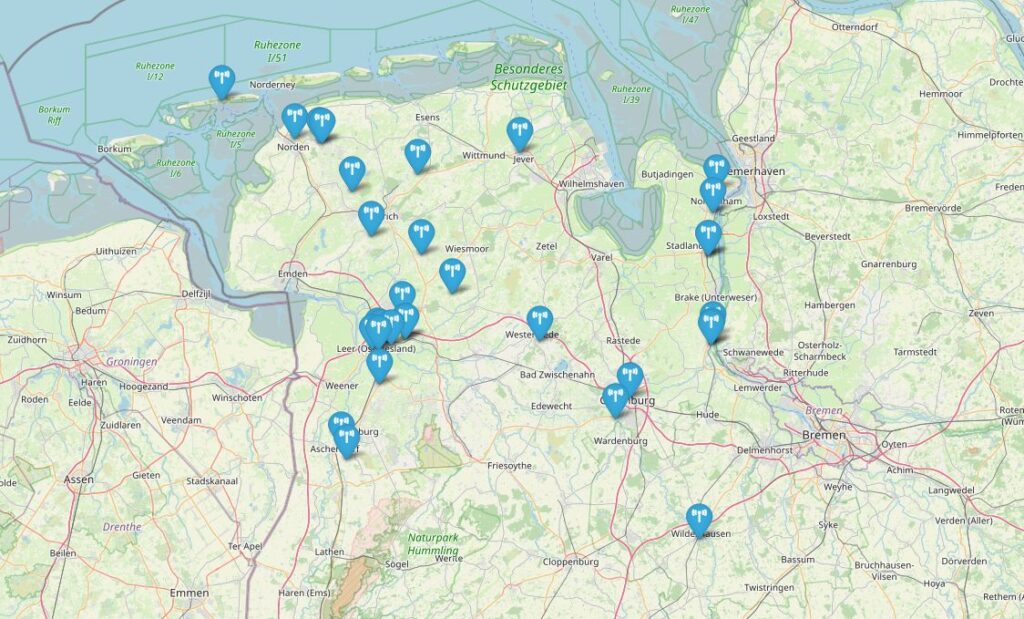
Kartendarstellung
Um die empfangenen Nodes übersichtlich auf einer Karte darzustellen, muss zunächst ein zusätzliches Paket installiert und eine Variable im Quellcode auf „True“ gesetzt werden. Auch diese Schritte sind auf der GitHub-Seite des Projekts ausführlich beschrieben. Anschließend generiert eine weitere Python-Anwendung die Karte als HTML-Datei, die im Browser geöffnet werden kann.
Wer eine kontinuierlich aktualisierte Karte wünscht, kann diesen Vorgang etwa unter Linux mit einem Cronjob automatisieren und die Karte dann auf einer Webseite mit automatischer Aktualisierung einbinden.
Interaktive html-Karte der empfangenen Nodes
Fazit
Die Python-Software Connect bietet eine einfache Möglichkeit, auch ohne eigene Meshtastic-Node aktiv am Netzwerkgeschehen teilzunehmen. Voraussetzung dafür ist ein Gateway, das die Funkdaten an einen MQTT-Server weiterleitet, auf den man selbst Zugriff hat. Zusätzlich müssen die verbundenen Meshtastic-Clients in ihrer Konfiguration der Weiterleitung an einen öffentlichen MQTT-Server zustimmen (Option „OK to MQTT“ aktiviert) und dürfen nicht die Option „Ignore MQTT“ aktiviert haben – nur dann wird man selbst im Netzwerk sichtbar.
Wünschenswerte Erweiterungen wären etwa die Unterstützung mehrerer Kanäle mit separaten Tabs im Nachrichtenfenster, eine stärkere Hervorhebung privater Nachrichten sowie die Möglichkeit, Statusmeldungen per Checkbox ein- oder auszublenden. Da der Quellcode offen zugänglich ist und in Python vorliegt, steht eigenen Anpassungen und Erweiterungen nichts im Weg.
Kennt ihr weitere Meshtastic-Software, die nicht unerwähnt bleiben sollte? Dann schreibt sie uns gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
MeshDash-SQL ist ein neuer MeshCom-Client für den Browser – wir stellen ihn euch vor.
Wir haben euch mit dem MeshCom-Client bereits eine Anwendung vorgestellt, mit der ihr eure MeshCom-Nachrichten nicht nur per Bluetooth auf dem Smartphone, sondern auch bequem über das Netzwerk am PC verwalten könnt. Wer den Artikel noch einmal nachlesen möchte, findet ihn hier.
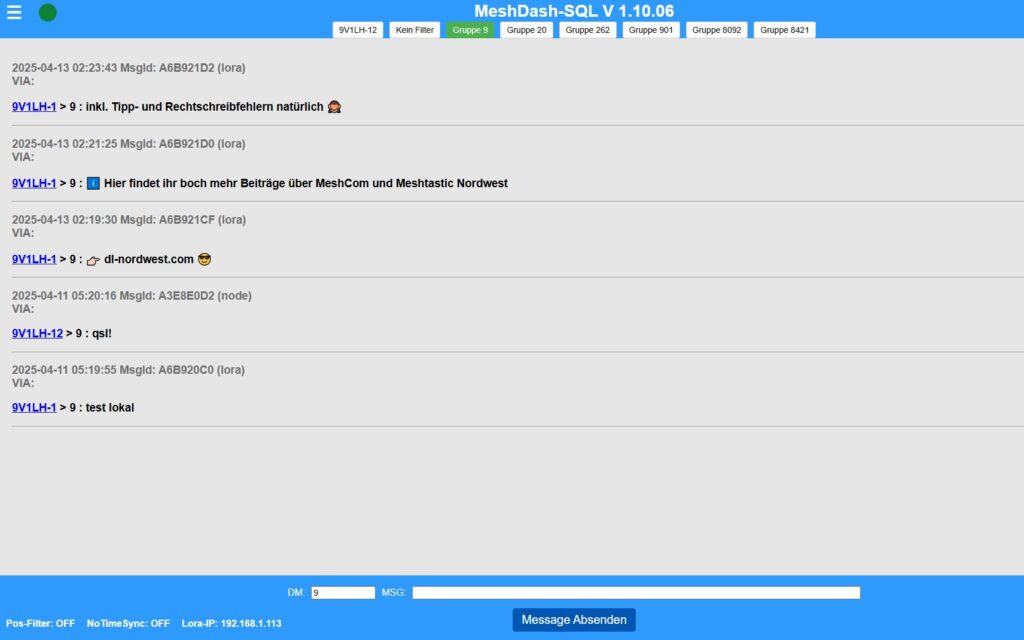
MeshDash-SQL: Plattformunabhängiger Zugriff über das Netzwerk
Im Gegensatz zur Python-Anwendung MeshCom-Client handelt es sich bei MeshDash-SQL um eine PHP-basierte Webanwendung, die ihre Daten in einer SQLite3-Datenbank speichert. Der große Vorteil dieser Lösung: Der Client ist nicht mehr an einen bestimmten Rechner gebunden – die Weboberfläche kann von jedem Gerät im Netzwerk aufgerufen werden, völlig unabhängig von Betriebssystem oder Browser.
MeshDash-SQL basiert ursprünglich auf einem Projekt von Andre DL4QB und wurde von Christian DH5DAN weiterentwickelt und in PHP umgesetzt.
Nachrichten an Gruppe 9 bleiben in der HF-Wolke – sie werden nicht an andere Gateways verteilt
Funktionsumfang von MeshDash-SQL
Mit Stand der Version 1.10.06-SQL bietet MeshDash-SQL bereits eine Vielzahl nützlicher Funktionen, die den Umgang mit MeshCom-Nachrichten deutlich komfortabler machen. Dazu gehören unter anderem:
Eigene Filtergruppen anlegen – zur gezielten Anzeige bestimmter Nachrichten
Steuerung von Skripten via Keywords – ermöglicht automatisierte Aktionen
Remote MHeard-Abfragen – Abfragen von empfangenen MeshCom-Nodes über das Netzwerk
Soundbenachrichtigungen – akustische Hinweise bei eingehenden (eigenen) Nachrichten
Updates direkt über die Weboberfläche – einfache Aktualisierung ohne manuelles Eingreifen
Senden von Befehlen an das LoRa-Modul – zur Fernsteuerung und Konfiguration
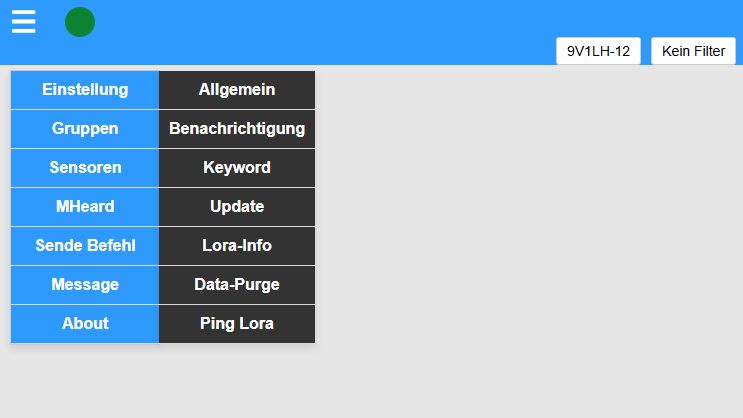
Die Konfiguration von MeshDash-SQL erfolgt ganz einfach über das Webmenü im Browser
Installation
Die Installation von MeshDash-SQL kann grundsätzlich auf allen Geräten erfolgen, die einen Webserver mit PHP sowie eine SQLite3-Datenbank hosten können. Eine ausführliche Anleitung in deutscher Sprache findet ihr auf der GitHub-Projektseite. Diese deckt alle Aspekte ab: von der Einrichtung über die Konfiguration einer MeshCom-Node oder eines Gateways bis hin zur Bedienung von MeshDash-SQL.
Für Raspbian, das auf Debian basiert, steht sogar ein Installations-Script bereit, das den gesamten Prozess automatisiert. Updates der Software lassen sich später bequem über die Weboberfläche durchführen.
Wichtig: MeshDash-SQL installiert standardmäßig den Lighttpd-Webserver und hostet die Weboberfläche im Verzeichnis /var/www/html/5d/. Falls auf eurem System bereits ein anderer Webserver wie z. B. Apache2 läuft, kann es hier zu Konflikten kommen.
So verbindet sich MeshDash-SQL mit eurer Node
Die Kommunikation zwischen eurer LoRa-Node bzw. eurem Gateway und MeshDash-SQL erfolgt über das Netzwerk per UDP-Pakete. Dafür muss eure MeshCom-Node mit dem Netzwerk verbunden sein, zum Beispiel über WLAN, und die IP-Adresse des Rechners kennen, auf dem MeshDash-SQL läuft.
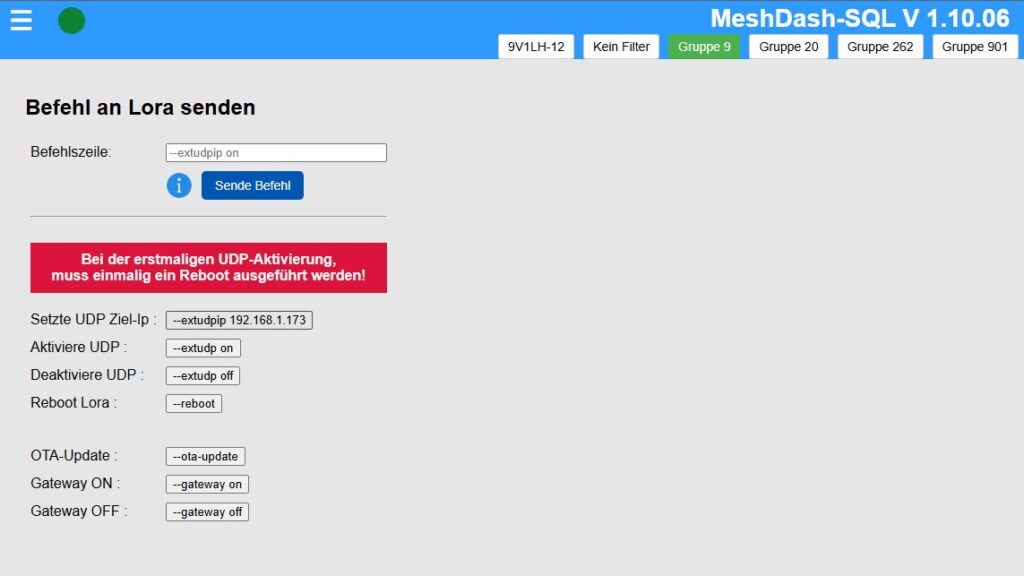
Falls ihr den Webserver auf eurer Node oder eurem Gateway aktiviert habt, könnt ihr die nötigen Befehle ganz bequem direkt aus MeshDash-SQL heraus senden: Unter dem Menüpunkt „Sende Befehl“ stehen euch die Kommandos ‑‑extudp on und ‑‑extudpip 192.168.xxx.xxx (mit der IP-Adresse des Rechners, der MeshDash-SQL hostet) zur Verfügung.
Das Senden von Befehlen an eure Node funktioniert ganz einfach über die Weboberfläche
Hinweis zu MeshCom GRC-Gruppen
Mit Gruppenmeldungen (GRC) lässt sich der Nachrichtenversand im MeshCom-Netz gezielt steuern. Der MeshCom-Server leitet Nachrichten an Gruppen nur an Gateways weiter, bei denen zumindest ein Node die jeweilige Gruppe gebucht hat. Wer welche Gruppen abonniert hat, lässt sich bequem im MeshCom-Dashboard unter meshcom.oevsv.at einsehen. Eigene Gruppen, wie zum Beispiel 8421 für DL-Nordwest, können ebenfalls frei definiert werden.
Wie auch im DMR-Netz hat die Gruppe 9 eine Sonderrolle: Nachrichten an diese Gruppe werden ausschließlich lokal über Funk (HF) verteilt und nicht über den MeshCom-Server an andere Gateways weitergeleitet.
Eine Übersicht standardisierter GRC-Gruppen findet ihr hier.
MeshCom GRC-Gruppen
Fazit
MeshDash-SQL bietet eine übersichtliche Darstellung von Nachrichten über eine Weboberfläche und ermöglicht bequeme Kommunikation im MeshCom-Netzwerk. Ideal für den Betrieb einer eigenen Node oder eines Gateways zu Hause und dank der Speicherung in einer Datenbank verpasst man keine wichtigen Nachrichten mehr.
Wer MeshDash-SQL selbst ausprobieren möchte, findet alle benötigten Informationen auf der GitHub-Seite von DH5DAN unter github.com/dh5dan/meshdash.
MeshDash-SQL auf Github
Seid ihr bereits im MeshCom-Netz QRV? Wenn ja, nutzt ihr einen Client wie MeshCom-Client oder MeshDash-SQL? Und welcher ist euer Favorit? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Was bietet die Meshtastic UI, und welche Geräte werden Stand März 2025 unterstützt?
Meshtastic ermöglicht Off-Grid-Kommunikation per Funk im LoRa-Verfahren. Bisher war dafür neben einer Meshtastic-kompatiblen LoRa-Hardware – etwa den weit verbreiteten Modulen von LilyGo oder Heltec – auch die Meshtastic-Smartphone-App erforderlich.
Zwar gibt es Geräte wie das LilyGo T-Deck, die bereits über Bildschirm und Tastatur verfügen, doch bis einschließlich Meshtastic Version 2.5 konnten diese nur eingeschränkt zur Eingabe von Nachrichten genutzt werden.
Was ist die Meshtastic UI und was bietet sie?
Mit Version 2.6 wird Meshtastic nun noch flexibler: Die Meshtastic UI bringt eine eigenständige Benutzeroberfläche direkt auf unterstützte Hardware. Damit lassen sich Nachrichten senden, Routen verwalten und Netzwerkinformationen abrufen – und zwar ganz ohne Smartphone!
Die Meshtastic UI bietet unter anderem einen Homescreen, auf dem Informationen wie neue Nachrichten, die Anzahl der online befindlichen Nodes und der verwendete Frequenzbereich angezeigt werden. In der Nodeliste sind alle empfangenen Nodes übersichtlich aufgelistet, und durch langes Drücken auf eine Node können direkt Nachrichten an diese gesendet werden. Im Tab Channels können die Chaträume eingesehen und konfiguriert werden. Zusätzlich besteht die Möglichkeit unter Map, eine Kartenansicht zu nutzen, wobei das Kartenmaterial zuvor auf die SD-Karte des Geräts geladen werden muss. Im Menü Settings lässt sich das Gerät schließlich vollständig konfigurieren.
Zu erwähnen sind auch die Meshtastic Tools, wie der Mesh Detector, der nach kompatiblen Geräten sucht, sowie der Signal Scanner, der das Signal-Rauschverhältnis (SNR) und die Empfangsfeldstärke (RSSI) in Relation zu einer zuvor gewählten Node anzeigt. Weitere nützliche Tools sind Trace Route, mit dem die Verbindung zwischen Nodes nachverfolgt werden kann, sowie die Statistiken und das Logbuch, die detaillierte Informationen über das Netzwerk und die Aktivitäten liefern.
Welche Hardware wird unterstützt?
Mit Stand vom 30.05.2025 werden die folgenden LoRa-Geräte vollständig unterstützt:
Achtet beim Kauf unbedingt darauf, dass die Hardware mit dem von euch verwendeten Frequenzbereich kompatibel ist. Für die Teilnahme an Meshtastic Nordwest wird ein Gerät mit 433 MHz benötigt.
Im Vergleich zum Seeed SenseCAP Indicator bietet das T-Deck Plus von LilyGo zusätzlich einen GPS-Empfänger, wodurch es auch im portablen Einsatz z.B. als Tracker besonders praktisch ist. Achtet darauf, unbedingt die Plus-Version des T-Deck zu kaufen. Nur dieses wird von der Meshtastic UI voll unterstützt und wird zudem gleich in einem passenden Gehäuse geliefert.
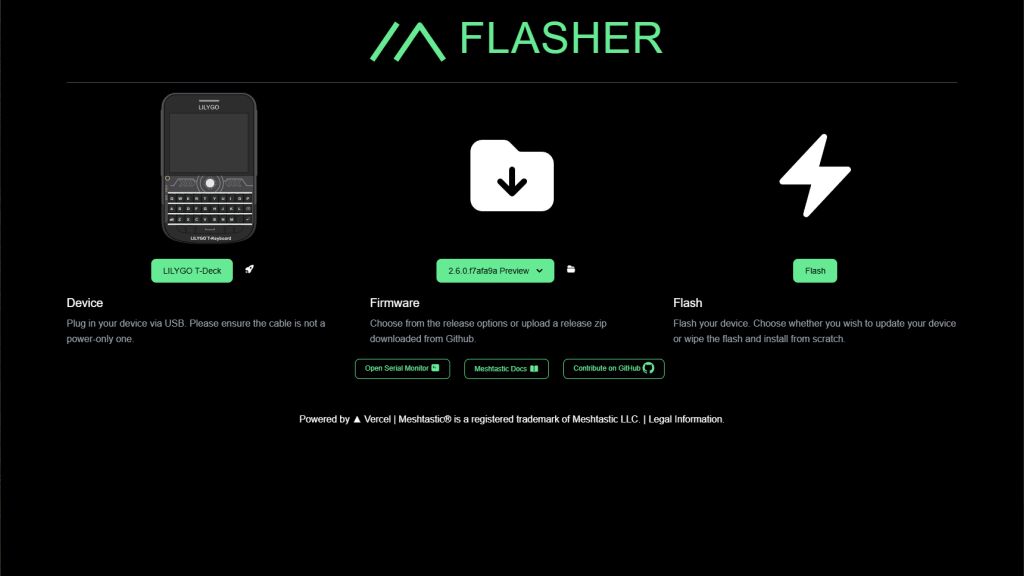
Firmware flashen
Um die Firmware mit der Meshtastic UI zu flashen, geht ihr wie folgt vor:
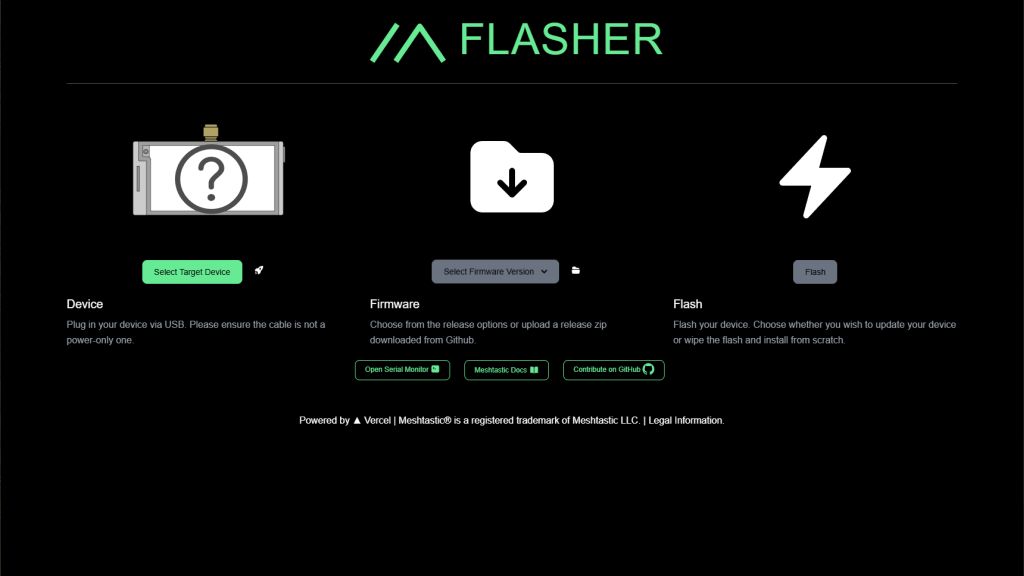
WebFlasher aufrufen: Öffnet den Meshtastic WebFlasher in einem kompatiblen Browser wie Google Chrome oder Microsoft Edge.
Meshtastic Web-Flasher
Tastenkombination eingeben: Gebt die hier abgebildete Tastenkombination auf eurer Tastatur ein. Nach erfolgreicher Eingabe ändert sich der Hintergrund der Webseite auf Schwarz (siehe Screenshot).
⬆️ ⬆️ ⬇️ ⬇️ ⬅️ ➡️ ⬅️ ➡️ b a
Standard WebFlasher
und nach Eingabe der Tastenkombination
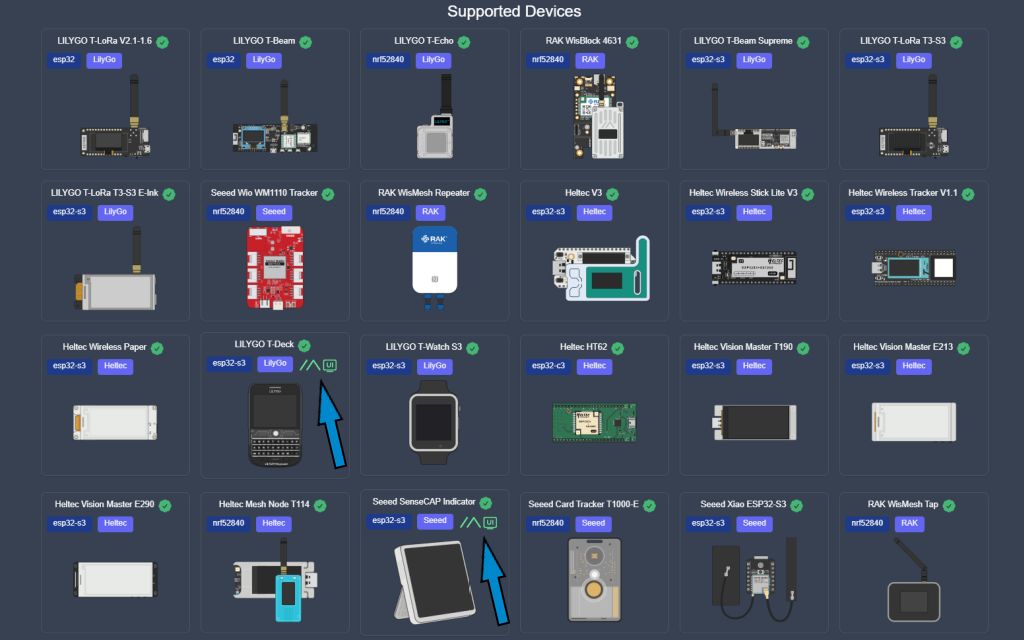
Gerät auswählen: Wählt unter Device eure Hardware aus. Unterstützte Geräte sind mit einem zusätzlichen Meshtastic-UI Icon gekennzeichnet – mit Stand vom 30.03.2025 sind das die im vorherigen Abschnitt genannten.
Auswahl der Hardware: Meshtastic-UI kompatible Geräte haben ein zusätzliches Meshtastic-UI Icon
Firmware-Version wählen: Wählt bei Firmware (Stand 30.03.2025) das Pre-Release 2.6.0.f7afa9a Technical Preview aus.
Wählt im Abschnitt Firmware das Pre-Release 2.6.0.f7afa9a Technical Preview (Stand 30.03.2025)
Flashen und UI aktivieren: Klickt auf Flash und aktiviert anschließend den Schiebeschalter „Meshtastic UI“
Fazit
Mit der Meshtastic UI wird die Off-Grid-Kommunikation noch einfacher und unabhängiger. Es ist zu erwarten, dass in Zukunft auch weitere und möglicherweise günstigere Hardware-Plattformen unterstützt werden. Wie ihr geeignetes Kartenmaterial auf die SD-Karte übertragen könnt, werden wir in einem zukünftigen Beitrag näher erläutern.
Besitzt ihr bereits eines der oben genannten Geräte und habt die Meshtastic UI schon ausprobiert? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Dieser Beitrag enthält Affiliate-Links. Wenn ihr über diese Links etwas bestellt, erhalten wir ggf. eine kleine Provision. Für euch entstehen dadurch keine zusätzlichen Kosten. Damit unterstützt ihr den Betrieb von DL-Nordwest.
Hier findet ihr weitere Beiträge über LoRa-Anwendungen:
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Nie wieder eine Nachricht verpassen! Der MeshCom-Client ermöglicht dir den bequemen Nachrichtenaustausch direkt auf deinem PC.
In dem Beitrag „MeshCom 4.0: LoRa-Datenfunknetzwerk der Funkamateure“ haben wir euch MeshCom als Amateurfunk-Alternative zu Meshtastic bereits vorgestellt. Wer ein MeshCom-Gateway oder eine Node lokal betreibt und dabei nicht immer die Handy-App mitlaufen lassen möchte, um keine Nachrichten zu verpassen, findet im MeshCom-Client eine komfortable Lösung. Die Software ist Open Source und wurde von Kim (DG9VH) in Python geschrieben, wodurch sie auf verschiedenen Plattformen lauffähig ist.
Die Installation oder eine spätere Aktualisierung gestalten sich besonders auf aktuellen Linux-Systemen mittels pipx denkbar einfach. pipx ist ein Tool zur isolierten Installation und Verwaltung von Python-Anwendungen, das sicherstellt, dass Abhängigkeiten nicht mit anderen Python-Paketen in Konflikt geraten. Eine detaillierte Anleitung ist im GitHub MeshCom-Client Repository zu finden.
MeshCom-Client Repository
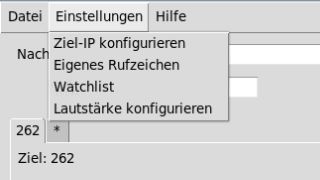
Konfiguration der Software
In der Software sind nur wenige Einstellungen erforderlich:
Ziel-IP: Die IP-Adresse des Gateways bzw. der Node, an die die Nachrichten gesendet werden sollen.
Rufzeichen-SSID: Das Rufzeichen inkl. SSID des Gateways bzw. der Node, über das Nachrichten empfangen und ausgesendet werden, z.B. 9V1LH-12.
Watchlist: Hier können Rufzeichen (ohne SSID) eingetragen werden, für die bei Empfang eine akustische Alarmierung erfolgen soll.
Lautstärke: Regulierung der Lautstärke der akustischen Alarmierung.
MeshCom-Client Einstellungsmenü
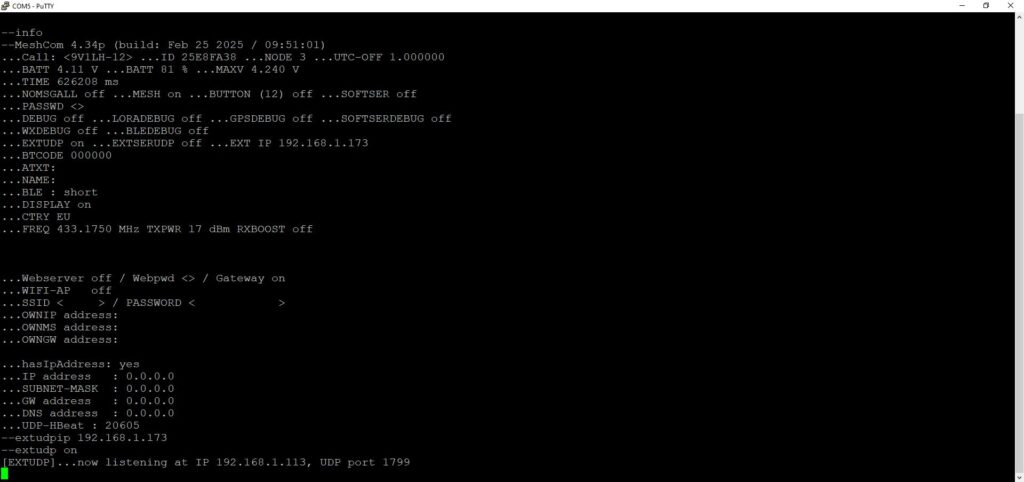
Konfiguration der Hardware
Zusätzlich zur Software-Konfiguration muss auch die Hardware entsprechend eingerichtet werden. In meinem Fall handelt es sich um ein Lilygo T-LoRa T3-S3. Vor der Konfiguration empfiehlt es sich, die Node bzw. das Gateway via Webflasher auf die jeweils neueste Firmware-Version zu aktualisieren. Aktuell ist dies die Version 4.34p (Stand beim Schreiben dieses Artikels).
Neben der Standardkonfiguration müssen die folgenden Befehle in der Node bzw. dem Gateway gesetzt werden:
--extudpip 192.168.1.173 [IP-Adresse des Computers, auf dem der MeshCom-Client betrieben wird]
--extudp on
Die Befehle können über ein Terminal-Programm wie PuTTY oder auch direkt über die Console des Webflashers gesetzt werden, wenn die Hardware mit einem USB-Datenkabel an einen Computer angeschlossen ist.
Im Terminalfenster des Programms PuTTY können Befehle an die Hardware gesendet werden
Funktionsumfang
Zum Zeitpunkt des Artikels liegt der MeshCom-Client in der Version 1.0.11 vor und bietet folgende Funktionen:
Gruppierung von Nachrichten in Tabs nach Zielrufzeichen oder Gruppen (GRC)
Akustische Benachrichtigung bei neuen Nachrichten
Watchlist mit Alarmfunktion für bestimmte Rufzeichen
Wiederherstellung des Chatverlaufs beim erneuten Öffnen eines Tabs
Gezieltes Öffnen bestimmter Chats auf Anfrage
Löschen des gesamten Chatverlaufs (auch aus der Wiederherstellungsquelle)
Mehrsprachigkeit (aktuell Deutsch und Englisch)
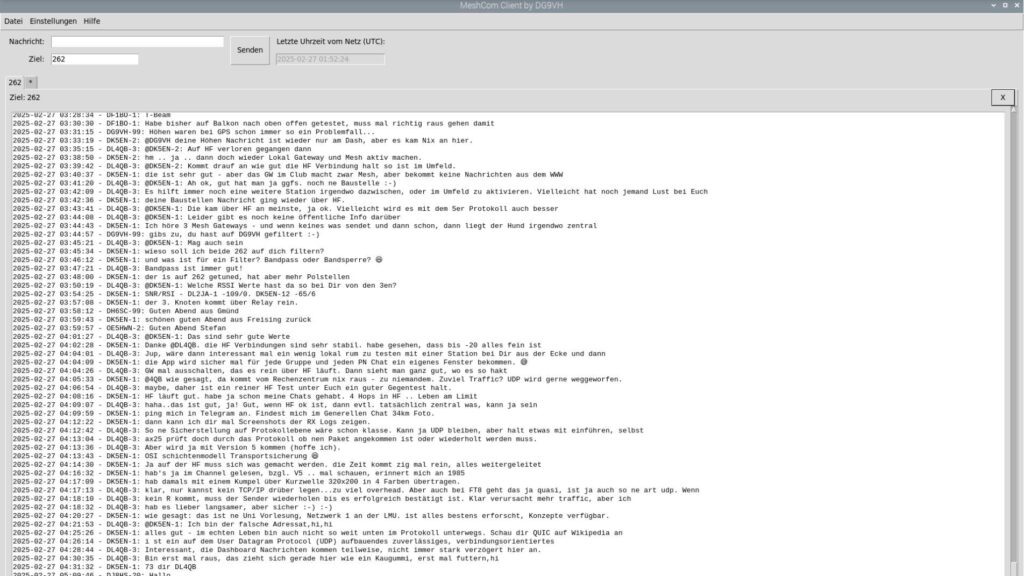
MeshCom-Client Nachrichtenfenster der Gruppe Deutschland 262
Fazit und Ausblick
Der MeshCom-Client von DG9VH bietet eine komfortable Möglichkeit, Nachrichten über den PC in das MeshCom-Netzwerk zu senden und zu empfangen. Auch verschiedene Chat-Gruppen, z. B. die 262 für Deutschland, werden übersichtlich in verschiedenen Tabs dargestellt.
In einer künftigen Erweiterung sollen empfangene Positionsdaten auf einer Karte dargestellt werden können.
Wer Nachrichten nicht nur von einem Computer, sondern von einem beliebigen Gerät in seinem lokalen Netzwerk mit einem Browser empfangen und versenden möchte, findet mit meshdash von DL4QB/DH5DAN eine weitere Alternative. Diese werden wir uns in einem späteren Artikel genauer anschauen.
Was haltet ihr vom MeshCom-Client? Habt ihr ihn bereits getestet oder plant ihr es? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Dieser Beitrag enthält Affiliate-Links. Wenn ihr über diese Links etwas bestellt, erhalten wir ggf. eine kleine Provision. Für euch entstehen dadurch keine zusätzlichen Kosten. Damit unterstützt ihr den Betrieb von DL-Nordwest.
Hier findet ihr weitere Beiträge zu LoRa-Datenfunk:
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Aufspielen der Firmware über das USB-Kabelohne Web-Flasher.
Wer eine Meshtastic-Node an einem abgelegenen Standort betreibt und die Firmware aktuell halten möchte, ohne für jedes Update persönlich dorthin fahren zu müssen, findet in der folgenden Lösung eine praktische Alternative.
Damit diese Lösung funktioniert, muss die Meshtastic-Node über ein USB-Datenkabel mit einem Rechner verbunden sein, der per Internet erreichbar ist. In meinem Fall betreibe ich bereits einen OpenWebRX+-Server rund um die Uhr auf einem Raspberry Pi 5, an den ich die Node über ein entsprechendes Datenkabel angeschlossen habe.
Die Kommunikation zwischen dem Linux-Rechner und der Meshtastic-Node erfolgt über eine serielle Schnittstelle. Mithilfe der Meshtastic Python CLI lässt sich die Node darüber nicht nur konfigurieren und fernbedienen, sondern mit dem ESPTOOL auch auf eine neue Firmware aktualisieren.
Wir zeigen euch Schritt für Schritt, wie ihr dabei manuell vorgeht.
Haftungsausschluss
Das Aufspielen der Firmware geschieht auf eigene Verantwortung. Wir übernehmen keine Haftung für Schäden an Hardware, Software oder Daten.
1. Benötigte Software-Pakete installieren
Zunächst verbindet ihr euch per SSH mit dem Host-Rechner, aktualisiert die Paketliste und installiert anschließend die benötigten Softwarepakete.
Falls auf eurem Zielrechner die Python-Umgebung extern verwaltet wird (externally-managed-environment), wie es bei mir mit OpenWebRX+ der Fall ist, solltet ihr zunächst eine neue Python-Umgebung anlegen und aktivieren. Anschließend installiert ihr die Meshtastic CLI und das ESPTOOL innerhalb dieser Umgebung.
Im nächsten Schritt müsst ihr den Port der seriellen Schnittstelle eurer Node auf dem Zielrechner herausfinden. Dazu lassen wir uns mit dem folgenden Befehl zunächst alle zugewiesenen Ports anzeigen.
ls /dev/ttyUSB* /dev/ttyACM*
In meinem Fall handelt es sich bei der Node um ein T-LoRa v2.1_1.6.1 von Lilygo, dem der Port ttyACM1 zugewiesen wurde. Bei euch kann die Portnummer jedoch variieren, und je nach Gerät könnte der Port auch beispielsweise ttyUSBx sein.
Lilygo T-LoRa v2.1_1.6.1
Sobald ihr den Port ermittelt habt, fügt ihr euren Nutzer der Gruppe ‚dialout‘ hinzu und gewährt ihm Schreib- und Leserechte für den zuvor ermittelten Port.
sudo usermod -a -G dialout $USER
sudo chmod a+rw /dev/ttyACM1
4. Aktuelle Firmware herunterladen
Nun benötigen wir noch die für euer Gerät passende Firmware. Geht dazu zunächst auf die Seite github.com/meshtastic/firmware/releases und scrollt zu der gewünschten Firmware-Version. Wer nicht unbedingt die neuesten Features benötigt, sondern lieber auf Nummer sicher gehen möchte, ist mit der neuesten Beta-Version gut beraten. Zum Zeitpunkt des Schreibens dieses Artikels handelt es sich dabei um die Version 2.5.20.4c97351 Beta.
Meshtastic Firmware Releases auf Github
In der Sektion ‚Assets‘ der entsprechenden Firmware kopiert ihr nun den für euer Board passenden Link zum ZIP-Archiv, das den Namen ‚firmware-<platform>-<version>.zip‘ trägt. Beim Lilygo T-LoRa v2.1_1.6.1 handelt es sich um ein ESP32-Board, also kopieren wir den Link zur Datei ‚firmware-esp32-2.5.20.4c97351.zip‘.
Ladet euch nun diese Datei in den Homefolder auf eurem Remote-Rechner herunter und entpackt das soeben heruntergeladene Archiv mit:
cd ~
wget https://github.com/meshtastic/firmware/releases/download/v2.5.20.4c97351/firmware-esp32-2.5.20.4c97351.zip
unzip firmware-esp32-2.5.20.4c97351.zip -d firmware-esp32-2.5.20.4c97351
cd firmware-esp32-2.5.20.4c97351
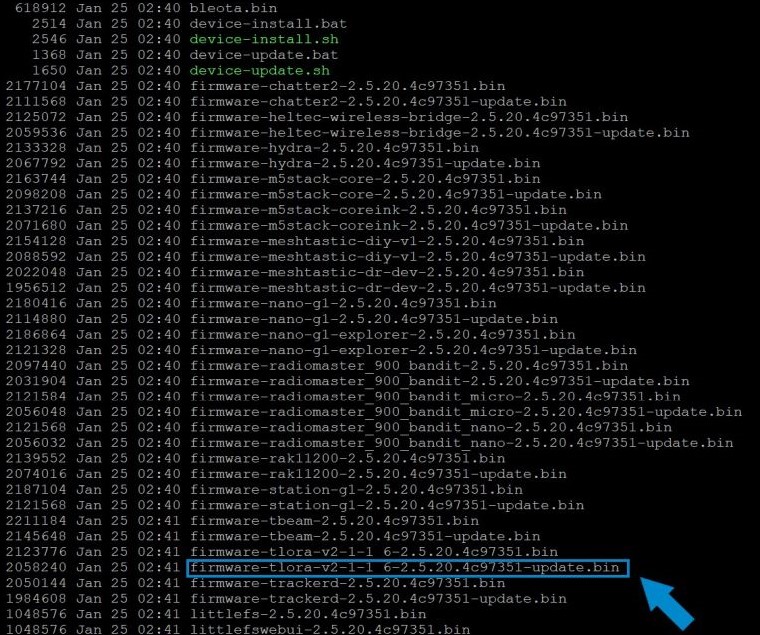
ls -al
Im Archiv befinden sich verschiedene Binärdateien mit der Endung .bin. Jetzt gilt es, die für euch passende Datei auszuwählen. In meinem Fall möchte ich die Firmware nur aktualisieren, sodass meine Einstellungen auf der Node erhalten bleiben. Daher wähle ich die Datei mit der Endung ‚-update.bin‘. Für das Lilygo T-LoRa v2.1_1.6.1 lautet die richtige Firmware-Datei ‚firmware-tlora-v2-1-1_6-2.5.20.4c97351-update.bin‚.
Das zip-file enthält verschiedene Firmware Dateien. Wählt die zu eurer Hardware passende.
Im nächsten Schritt übertragen wir diese Binärdatei nun auf die Meshtastic-Hardware.
Optional: Node-Einstellungen sichern
Bevor ihr die Firmware auf das Gerät übertragt, könnt ihr optional eure Einstellungen sichern.
Nun starten wir den eigentlichen Vorgang zum Aufspielen der Firmware. Passt die unten stehenden Befehle entsprechend dem von euch ermittelten Port (/dev/ttyXXXN) und der Firmware-Datei (xxx.bin) an.
Wurde der Flashvorgang erfolgreich abgeschlossen, könnt ihr mit dem folgenden Befehl die Versionsnummer eurer Meshtastic-Node auslesen und anzeigen lassen:
Alternative: Komfortables Aufspielen mit Linux-Script
Um diesen Prozess komfortabler zu gestalten, hat der GitHub-User mikcecarper ein Skript geschrieben, das euch mit einem Menü durch die verschiedenen Schritte begleitet. Es übernimmt das Herunterladen und Entpacken der Firmware-Datei sowie das Aufspielen auf euer Board.
Die entsprechenden Dateien sowie eine Anleitung zur Verwendung findet ihr in seinem Repository.
meshfirmware auf Github
In diesem Beitrag haben wir euch Schritt für Schritt gezeigt, wie ihr die Firmware eurer Meshtastic-Node unter Linux direkt im Terminal aufspielen könnt – ganz ohne Web-Flasher. Voraussetzung dafür ist, dass die Node per USB mit einem Linux-Rechner verbunden ist, dieser über eine Internetverbindung verfügt und gegebenenfalls von außen, z. B. per SSH, erreichbar ist.
Der gezeigte Vorgang lässt sich in gleicher Weise auch für andere ESP32-Firmware nutzen, beispielsweise für eine MeshCom-Node.
Viel Erfolg!
Habt ihr Fragen zu unserem Beitrag oder weitere Anregungen? Schreibt sie uns gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Plattformübergreifende Open-Source-Software mit Kartendarstellung, Nachrichtenversand und Traceroute-Funktion.
In meinem heimischen Shack betreibe ich eine Meshtastic-Node für das Netzwerk Meshtastic Nordwest. Anfangs nutzte ich die Web-UI der Node, da ich nicht ständig aufs Smartphone schauen wollte, um die Netzwerkaktivitäten im Blick zu behalten. Doch wirklich zufrieden war ich damit nicht, da dessen Performance zu wünschen übrig ließ.
Beim OV-Abend kam dann der entscheidende Tipp: OM Harald DG6BCW empfahl mir MeshSense, eine plattformübergreifende Open-Source-Software für Meshtastic. Sie bietet vorkompilierte Binaries für Windows (x64), Linux (x64) und Mac Silicon (arm64) – genau das, was ich suchte!
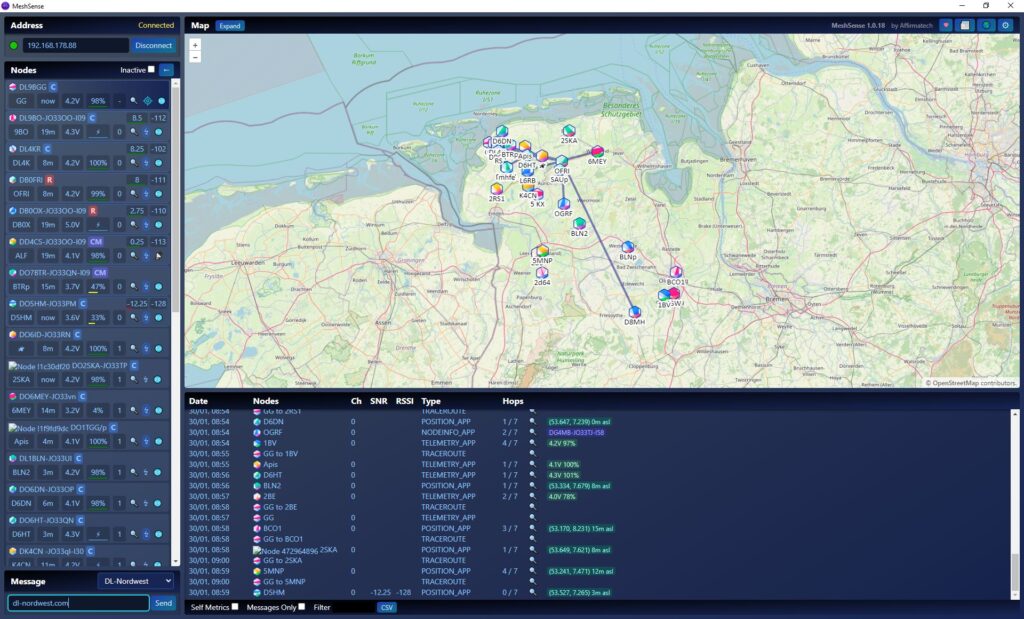
Die Einrichtung von MeshSense könnte kaum einfacher sein: Einfach die IP-Adresse der Node eingeben, und schon werden die Daten ausgelesen.
Die Aktivität des gesamten Netzwerkes wird übersichtlich dargestellt
Empfangene Nodes werden übersichtlich im linken Bildschirmbereich angezeigt – die zuletzt empfangenen ganz oben. Neben dem Node-Namen zeigt MeshSense auch wichtige Informationen pro Node an, darunter die Konfigurationsrolle (z. B. Client oder Repeater), den Kurznamen, den letzten Empfangszeitpunkt, die Batteriespannung und den Ladezustand. Zusätzlich werden die Anzahl der Hops, über die die Node empfangen wurde, sowie bei direkt gehörten Stationen der Signal-Rausch-Abstand (SNR) und die Signalstärke (RSSI) angezeigt.
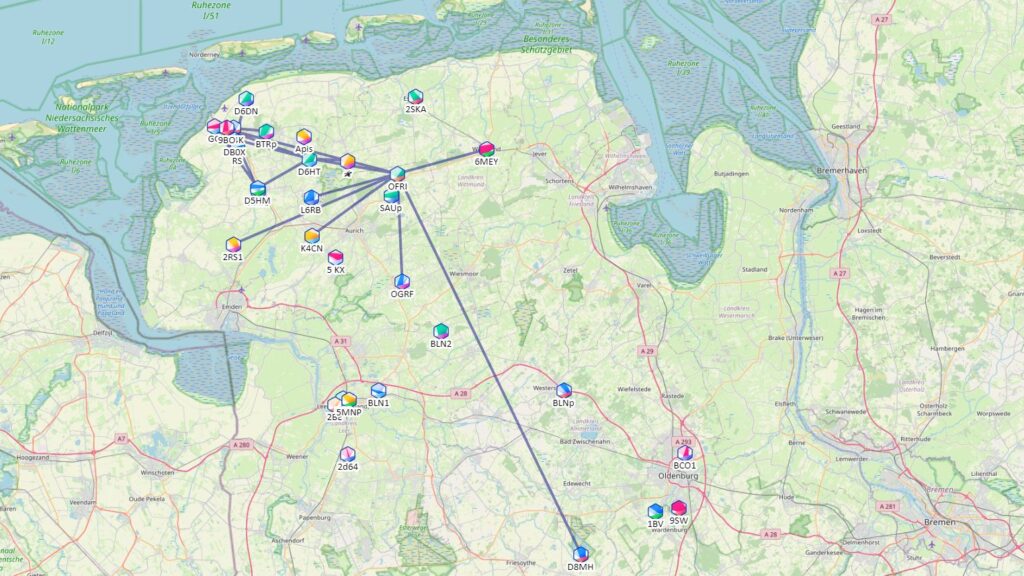
In der rechten oberen Hälfte findet sich eine Karte, die sich frei zoomen lässt. Darunter werden alle empfangenen Datenpakete in einer Tabelle dargestellt. Wer gezielt nur bestimmte Informationen, etwa Textnachrichten, sehen möchte, kann einen Filter aktivieren. Praktisch: Das Logbuch lässt sich als CSV-Datei exportieren.
Momentaufnahme: Meshtastic Nordwest Netzwerk am 30.01.2025, empfangen bei DL9BGG
Nachrichten können direkt in der linken unteren Ecke versendet werden. Zuvor wählt man einfach die gewünschte Gruppe aus einer Liste der in der Node konfigurierten Kanäle. Für Direktnachrichten reicht ein Klick auf den Namen des Empfängers in der Node-Liste.
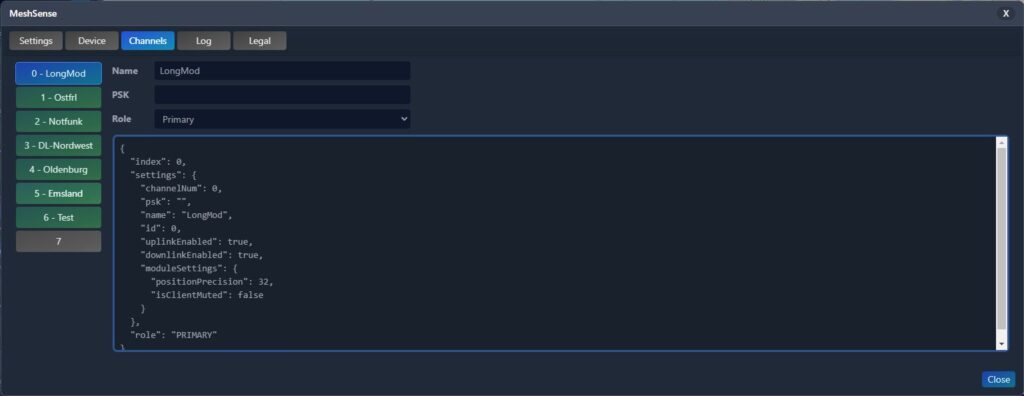
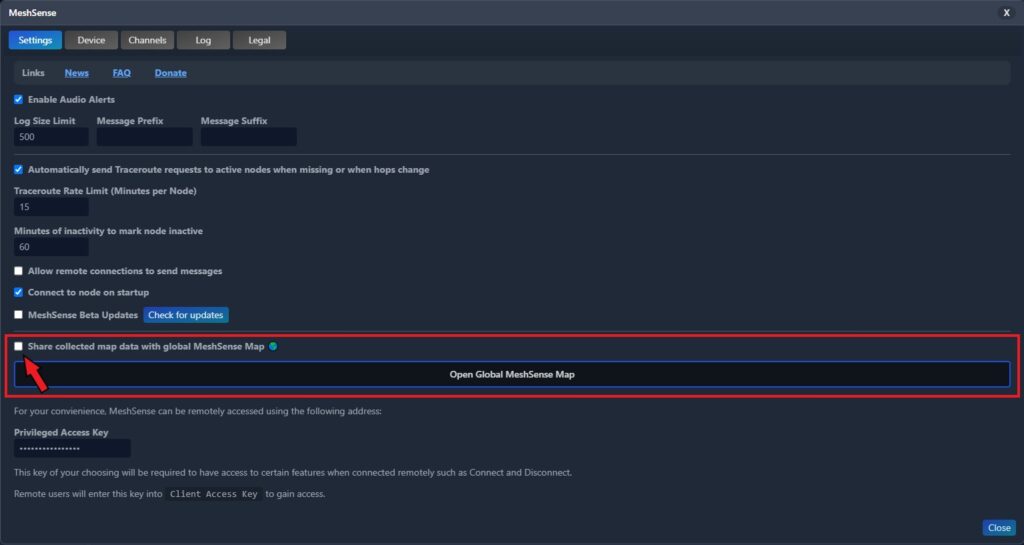
Über das kleine Zahnrad-Symbol oben rechts gelangt man zu den Einstellungen. Hier kann man beispielsweise automatische Traceroutes aktivieren oder sich die aktuelle Einstellung seiner Nodes anzeigen lassen – ändern lassen sie sich über MeshSense jedoch nicht. Einzige Ausnahme: Die Kanäle lassen sich direkt über die Software konfigurieren.
Konfiguration der Kanäle in MeshSense
Verwendung von MeshSense im Netzwerk Meshtastic Nordwest
In den Einstellungen die Option „Share collected map data with global MeshSense Map 🌎“ bitte unbedingt deaktiviert lassen! Meshtastic Nordwest findet außschließlich auf HF-Wegen statt.
Probiert es doch einfach selbst mal aus und schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Wie du dein Android-Smartphone für einen schmalen Taler in ein Handfunkgerät verwandelst
Die Kombination aus einem Android-Smartphone und einem FM-Funkgerät in einem Gerät ist keine neue Idee – doch bisher war sie oft mit hohen Kosten verbunden. Hinzu kommt, dass Smartphone-Technologie schnell veraltet, und niemand möchte alle zwei Jahre ein teures Gerät ersetzen müssen.
Das kv4p HT wird mit einem Gel-Klebepad direkt rückseitig am Smartphone befestigt
Der Funkamateur Vance Vagell, Rufzeichen KV4P, hat hierfür eine clevere Lösung entwickelt: Ein kleines, erschwingliches Modul auf Basis der beliebten FM-Funkmodule DRA818 oder SA818. Dieses Modul wird direkt an das Smartphone angeschlossen und nutzt dessen Mikrofon, Lautsprecher und Bildschirm, um als vollwertiges Handfunkgerät zu funktionieren.
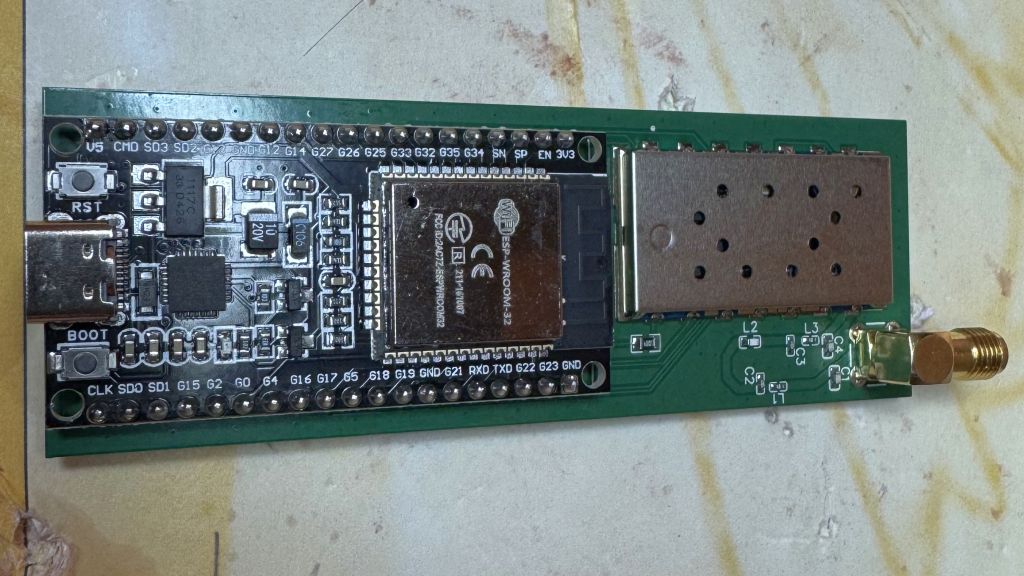
Vollständig bestückte Leiterplatte
Das Beste daran: Das Projekt ist vollständig Open-Source. Dadurch kann die Community der Funkamateure aktiv an der Weiterentwicklung mitwirken und so das Potenzial dieser innovativen Idee voll ausschöpfen.
Rolf, DL4KR, und ich haben uns dieses spannende Projekt genauer angeschaut und möchten im Folgenden über unsere Erfahrungen berichten.
Zunächst findet man alle benötigten Informationen auf der Webseite von KV4P. Wir haben als Grundlage die neueste Version der Leiterplattendaten heruntergeladen – in unserem Fall die Version 1.7b. Diese Version bietet im Vergleich zu früheren Ausführungen die Möglichkeit, ein HF-Filter-Netzwerk zur Minimierung unerwünschter Oberwellen aufzulöten.
kv4p HT Infoseite
Leiterplattenherstellung
Da die gewählten Komponenten im SMD-Design in Baugröße 0402 sehr klein sind, haben wir uns dazu entschieden, die Bestückung der SMD-Komponenten direkt vom Leiterplattenhersteller durchführen zu lassen. Lediglich die THT-Komponenten – wie das notwendige Mikroprozessor-Board auf Basis eines ESP32, der SMA-Konnektor sowie das Auflöten des FM-Funkmoduls (bei uns ein SA818 in der 1-W-VHF-Version) – haben wir selbst übernommen.
Hinweis zur Bestellung des Funkmoduls
Bei der Wahl des Funkmoduls ist darauf zu achten, dass es kompatibel zum DRA818 ist. Wir haben uns für das SA818S von NiceRF entschieden, da es etwas schnellere Umschaltzeiten bietet.
Die Module sind für unterschiedliche Frequenzbereiche und Ausgangsleistungen erhältlich. Für dieses Projekt benötigt ihr die VHF-Variante. Da im kv4p HT keine aktive Kühlung für das Funkmodul vorgesehen ist, empfehlen wir die Verwendung des 1-Watt-Moduls.
Passende VHF-Funkmodule gibt es u.a. auf Aliexpress
Grundsätzlich hat man die freie Wahl, bei welchem Hersteller man die Leiterplatte fertigen lässt. Wir haben in der Vergangenheit bereits gute Erfahrungen mit JLCPCB gemacht. Sie bieten günstige Preise, schnelle Lieferung und eine hohe Qualität. Allerdings sind dort nicht immer alle benötigten Komponenten auf Lager – so war es auch bei diesem Fall. Daher haben wir uns dieses Mal für PCBWay entschieden. Ein entsprechendes Projekt, das sich direkt in den Warenkorb legen lässt, hat Vance dafür bereits angelegt. So wird der Bestellprozess deutlich vereinfacht.
Nach nur kurzer Zeit waren sowohl die vorbestückte Leiterplatte als auch alle anderen benötigten Komponenten eingetroffen, und die Lötarbeiten konnten beginnen.
Komponenten für das kv4p HT vor dem Zusammenbau
In einem knapp 16-minütigen Video beschreibt Vance den gesamten Prozess detailliert, sodass wir an dieser Stelle nicht weiter darauf eingehen.
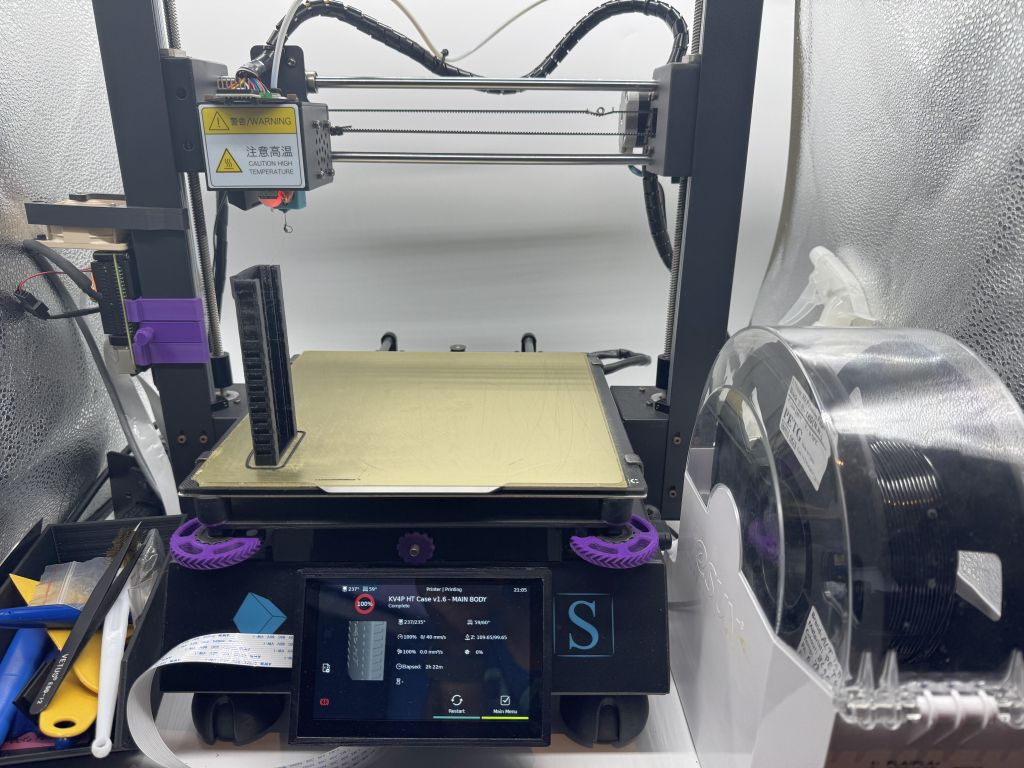
Wer einen 3D-Drucker besitzt oder einen befreundeten OM mit einem solchen kennt, sollte sich gleich das passende Gehäuse ausdrucken. Auf der GitHub-Seite des Projekts stehen dazu verschiedene Designs zur Auswahl.
Ein passendes Gehäuse lässt sich mit einem 3D-Drucker erstellen
Firmware
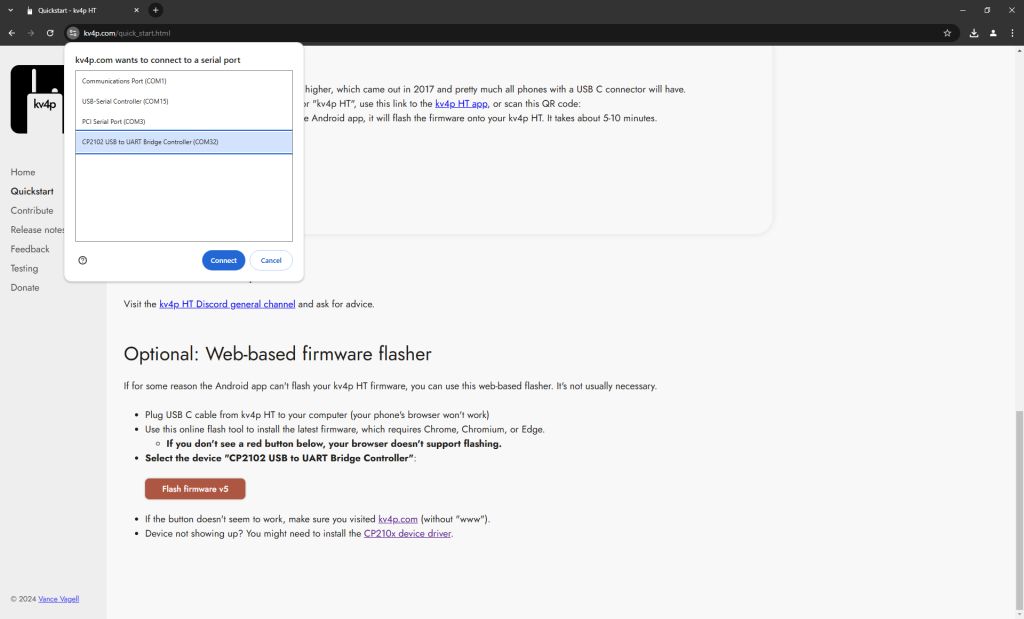
Auch das Aufspielen (Flashen) der Firmware über den Web-Flasher (Quickstart ganz unten) gestaltet sich sehr einfach. Für den Web-Flasher wird ein kompatibler Browser wie Chrome vorausgesetzt. Achtet darauf, dass ihr ein USB-Typ-C-Datenkabel verwendet, damit das ESP32-Board mit dem PC kommunizieren kann. Alternativ kann die Firmware auch direkt mit der Android-App aufgespielt werden. In unserem Fall wurde das Modul jedoch zunächst nicht ordnungsgemäß erkannt. Bei Erscheinen dieses Beitrags liegt die Firmware in der Version 5 vom 30.12.2024 vor.
Web-basiertes Aufspielen der Firmware im Chrome-Browser. Das kv4p HT wird als CP2102 USB-Gerät erkannt.
Mögliche Fehlerquellen
Auch nach dem Aufspielen der Firmware wollte die Android-Anwendung auf unserem Smartphone das kv4p HT einfach nicht erkennen. Uns fiel jedoch auf, dass es durch den von uns bestellten USB-Typ-C-Winkeladapter nicht mit Spannung versorgt wurde. Wir haben daraufhin zunächst kurze Kabeladapter verwendet, um das Problem zu umgehen.
Hinweis zum USB-Typ-C-Winkeladapter
Achtet bei der Bestellung darauf, dass ihr einen OTG-Adapter verwendet. Da das kv4p HT relativ viel Strom benötigt – besonders beim Sendevorgang – empfiehlt sich die Verwendung eines OTG-Adapters mit zusätzlichem Eingang zum Anschluss einer Powerbank.
Passende USB-OTG Adapter gibt es u.a. auf Aliexpress
Ein weiterer Punkt, den es zu beachten gilt, ist, dass die Anwendung bei erstmaliger Ausführung nach Berechtigungen fragt, um auf das angeschlossene USB-Gerät, in unserem Fall das kv4p HT, zugreifen zu dürfen. Diese Berechtigung müsst ihr unbedingt erteilen. Falls ihr die Abfrage nicht erhalten habt oder sie weggeklickt habt, kann es helfen, die Anwendung vollständig zu beenden und zu deinstallieren, dann neu zu installieren und erneut auszuführen.
Aktueller Funktionsumfang
Aktuell ist das kv4p HT nur in einer VHF (2m-Band) Variante erhältlich. Es wird jedoch bereits über eine UHF-Variante nachgedacht. Dabei wäre nicht nur die Bestückung eines anderen Funkmoduls notwendig, sondern auch ein anderes Filternetzwerk sowie eine angepasste Firmware.
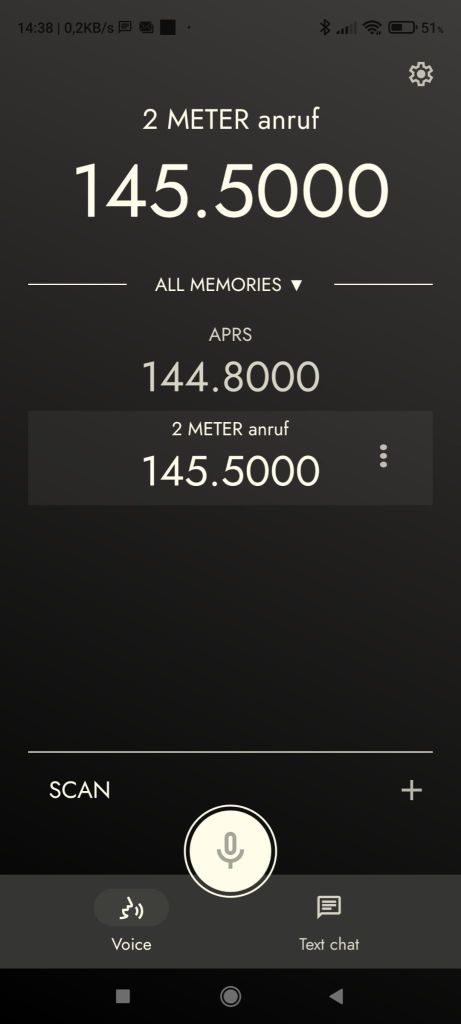
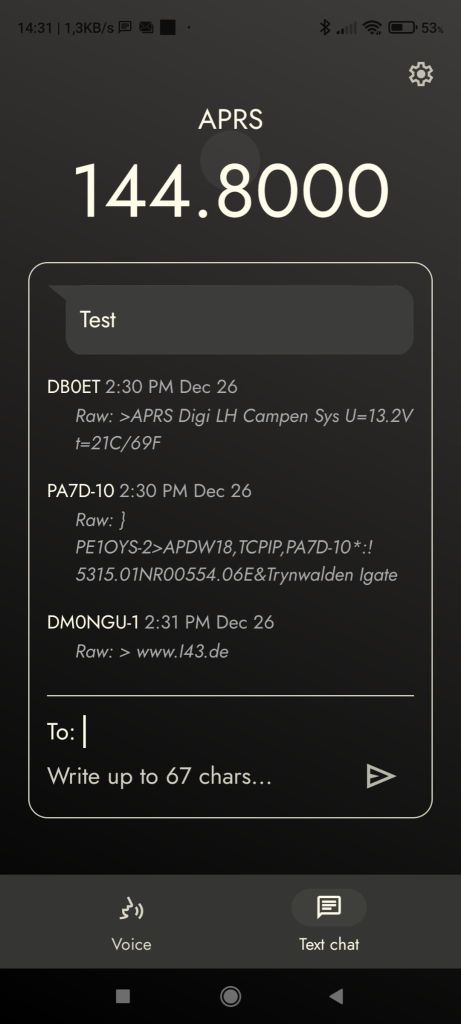
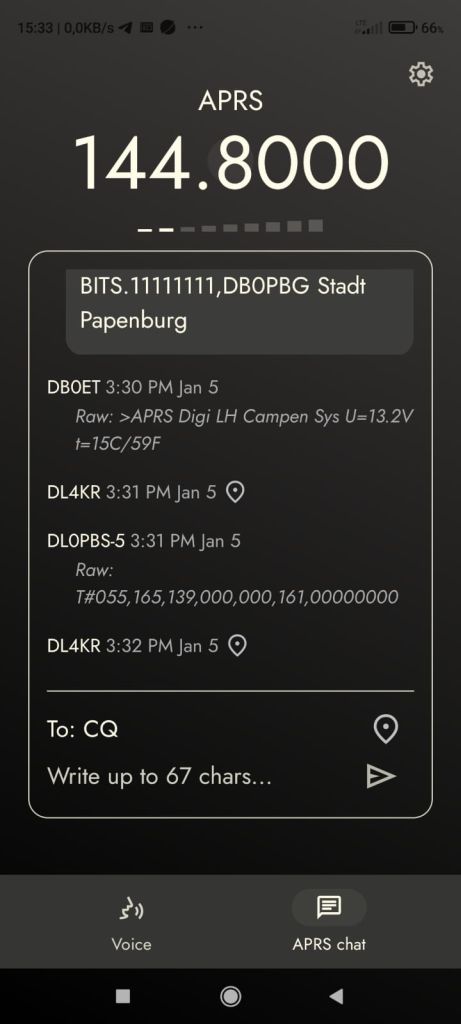
Unterstützt wird nicht nur der FM-Foniebetrieb, sondern auch das Versenden und Empfangen von APRS-Nachrichten sowie Positionsdaten mit 1200 Baud. Die Android-Anwendung bietet zudem Scan-Funktionen und Speicherkanäle, um die Bedienung noch komfortabler zu gestalten.
Auswahl von Speicherkanälen
APRS-Nachrichten Empfang und Versand
In den Einstellungen wird dazu „Beacon my position“ aktiviert
ESP32 Firmware v5 und die Android App v1.6.0. unterstützt jetzt auch das Aussenden von APRS-Positionsbaken
Zusammenfassung und Ausblick
Auch wenn jeder von uns sicher schon etliche Handfunkgeräte sein Eigen nennt und diese teilweise sogar günstiger zu haben sind als die für das kv4p HT benötigten Komponenten, bietet das Projekt doch einiges an Mehrwert. Besonders spannend wird es, wenn das kv4p HT eine Anbindung an Anwendungen wie RepeaterBook und APRSdroid bietet.
Leider ist das kv4p HT nur zu Android-Smartphones kompatibel. Ich habe jedoch bereits viele Ideen, das günstige Modul zum Beispiel auch unter Linux zu nutzen. So könnte ich mir vorstellen, daraus unter Linux einen kostengünstigen APRS-Digi mit iGate zu realisieren. Eventuell bietet es auch einen Anreiz für Experimente mit der Software GNU Radio.
Der Aufbau und Test des kv4p HT hat uns viel Spaß bereitet und kann besonders als Gemeinschaftsprojekt im eigenen Ortsverband empfohlen werden.
Probiert es selbst aus und werdet Teil der Open-Source-Funk-Gemeinschaft – lasst uns in den Kommentare unter diesen Beitrag oder in unserer Telegram- und oder WhatsApp-Gruppe gerne wissen, welche kreativen Einsatzmöglichkeiten ihr für das kv4p HT findet!
Dieser Beitrag enthält Affiliate-Links. Wenn ihr über diese Links etwas bestellt, erhalten wir ggf. eine kleine Provision. Für euch entstehen dadurch keine zusätzlichen Kosten. Damit unterstützt ihr den Betrieb von DL-Nordwest.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Einwilligung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Einwillligung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Präferenzen
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.