Ein abgestürzter Hotspot oder Transceiver? Mit einem Shelly-Relais lassen sich Geräte bequem aus der Ferne stromlos schalten und wieder einschalten, sowohl an 230 V als auch direkt an 12 V.
Viele Funkamateure setzen Hotspots oder auch remote gesteuerte Funkstationen ein. Damit im Falle des Falles ein nicht mehr reagierendes Funkgerät oder ein Hotspot aus der Distanz stromlos geschaltet werden kann, bieten Lösungen aus der Hausautomatisierung interessante Möglichkeiten. In diesem Beitrag möchte ich mich auf die Produkte von Shelly beziehen. Andere Home-Automatisierungs-Lösungen bieten gegebenenfalls vergleichbare Funktionen.
Durch die hohe Kompatibilität lassen sich Shelly-Geräte sehr einfach in bestehende Smart-Home-Lösungen integrieren. Auch eine Anbindung an Systeme wie Amazon Alexa oder Google Home ist mit wenigen Schritten realisierbar, sofern dies gewünscht ist. Darüber hinaus ist bei einigen Shelly-Produkten auch die direkte Integration in 12 V Gleichstromanlagen problemlos möglich.
Grundvoraussetzung ist, wie bei allen Home-Automatisierungs-Lösungen, ein vorhandenes und funktionierendes WLAN am Einsatzort.
Shelly-Produkte
Im Bereich der privaten Hausautomatisierung gibt es eine Vielzahl von Herstellern und Lösungen. Seit 2018 bietet die bulgarische Firma Shelly Group SE (www.shelly.com) kostengünstige und interessante Produkte an. Der Bezug ist über zahlreiche Elektronik-Onlinehändler möglich.
Im Folgenden möchte ich den Shelly 1 in der aktuellen dritten Generation (Gen.3) vorstellen. Der Shelly 1 ist eines der einfachsten Produkte der Familie und bereits ab etwa 12 Euro erhältlich. Im Grunde handelt es sich um ein über WLAN und das Internet fernsteuerbares Relais.
Der Shelly 1 kann direkt mit einer 12 V Spannungsversorgung betrieben werden. Dadurch konnte ich ihn problemlos in meine bestehende 12 V PV-Stromanlage integrieren. Dieser Ansatz dürfte auch für Wohnmobilisten interessant sein, die ihr Fahrzeug smarter gestalten möchten. Die Bedienung erfolgt über die kostenlose Shelly-App, die sowohl für Android als auch iOS verfügbar ist.
Meine Anwendung der Shellys im Amateurfunk
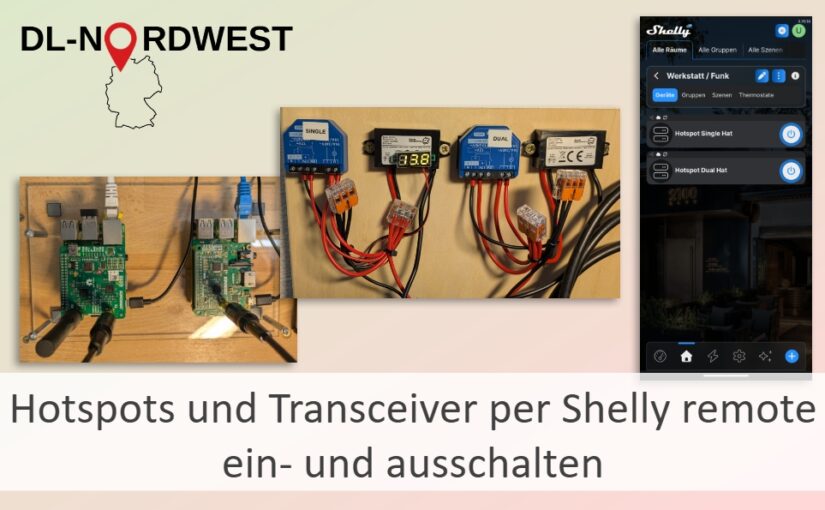
Im Bereich der digitalen Sprachübertragung (DV) verwende ich zwei Raspberry-Pi-basierte MMDVM-Hotspots. Beide Hotspots, ein Single-Hat und ein Dual-Hat, laufen mit der Software Pi-Star, die bereits von Haus aus einen Remotezugang ermöglicht. Ein stromloses Aus- und Wiedereinschalten ist darüber jedoch nicht möglich.
Beide Geräte sind in meinem Shack an eine Batterie-Notstromversorgung angeschlossen. Die Batterie wird kontinuierlich über ein PV-Modul und einen Laderegler geladen. Mit dieser Insellösung habe ich seit 2022 sehr gute Erfahrungen gemacht. Neben den Raspberrys werden bei Bedarf auch ein Mobilfunkgerät für 2 m und 70 cm sowie diverse Kleinverbraucher versorgt.


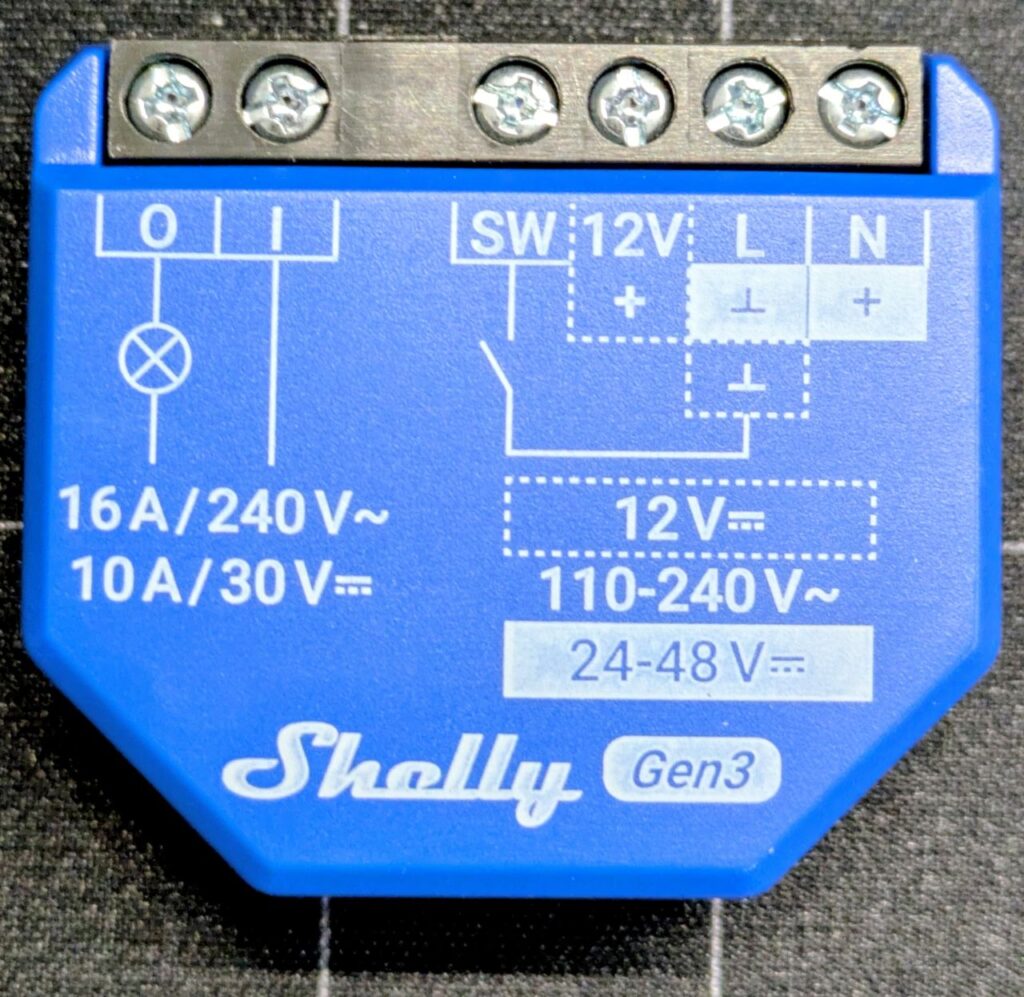
Die 5 V USB-Spannungsversorgung für die Raspberrys wird über jeweils einen DC/DC-Spannungskonverter von Bauer Electronics sichergestellt. Die Verkabelung des Shelly 1 für den Betrieb an 12 V ist einfach und weitgehend selbsterklärend, wie das folgende Schema zeigt.
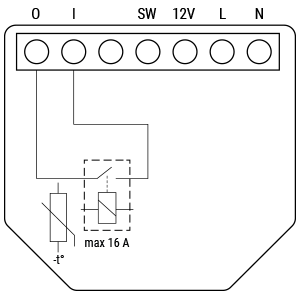
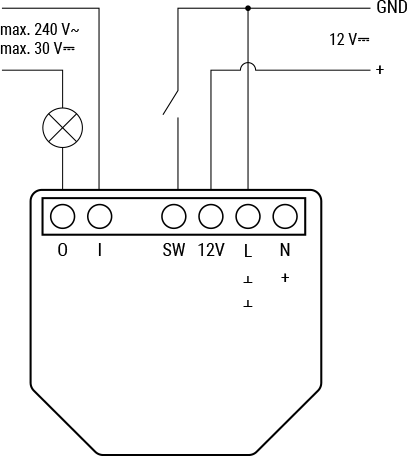
Die maximal zulässige Schaltspannung beträgt 30 V DC beziehungsweise 240 V AC bei einem maximalen Strom von 16 A. Der Eigenverbrauch des Shelly 1 inklusive WLAN-Modul liegt bei weniger als 1,2 W.
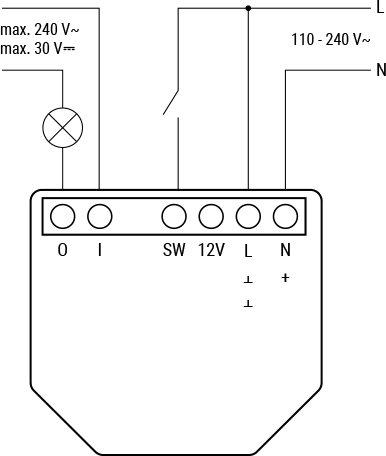
Soll statt einer 12 V Batteriespannung die 230 V Wechselspannung des Hausnetzes geschaltet werden, ist die Verkabelung gemäß Bild 5 auszuführen. Die entsprechenden Sicherheitsvorschriften nach DIN-VDE sind dabei selbstverständlich zu beachten.
Möchte oder muss ich einen Transceiver, in diesem Fall einen Hotspot, stromlos schalten, kann ich dies bequem und ortsunabhängig über die Shelly-App erledigen, sofern eine Verbindung über Mobilfunknetz oder WLAN besteht.
Die Shelly-App bietet darüber hinaus umfangreiche Automatisierungs- und Überwachungsmöglichkeiten. Von individuell eingerichteten Szenen bis hin zur Echtzeitüberwachung von Energieflüssen stehen zahlreiche Funktionen zur Verfügung, die bei einigen Shelly-Modellen problemlos genutzt werden können. Die Steuerung ist sowohl innerhalb des eigenen WLANs als auch über das Internet möglich. Die App steht kostenlos in den üblichen App-Stores zum Download bereit.
Fazit
Die Erweiterung einer Stromversorgung um ein smartes WLAN-Relais ermöglicht das komfortable Aus- und Einschalten von Hotspots oder Transceivern. Eine solche Lösung bietet nicht nur zusätzlichen Komfort, sondern auch ein Plus an Sicherheit, wenn ein Gerät einmal nicht mehr erreichbar ist.
Auch im täglichen Betrieb kann dies hilfreich sein, beispielsweise wenn sich das Gerät im Keller, auf dem Dachboden oder sogar auf einem Mast befindet. Ein vollständiger Kaltstart lässt sich dann bequem aus der Ferne durchführen, ohne dass vor Ort ein Stecker gezogen werden muss.
Natürlich sollte ein Raspberry Pi, sofern noch erreichbar, möglichst sauber heruntergefahren werden. In der Praxis gelingt dies jedoch nicht immer. Negative EMV-Einflüsse konnte ich bislang nicht feststellen.
Die hier gezeigte Lösung ist keine Raketentechnik und lässt sich auch ohne große Vorkenntnisse einfach umsetzen. Dieser Beitrag soll als Anregung für eigene Projekte dienen. Für Kritik, Anmerkungen und Fragen könnt ihr mich gerne unter DG1KK@darc.de kontaktieren.
Viel Spaß beim Basteln!
vy 73, Uwe, DG1KK
Das Team von DL-Nordwest bedankt sich bei Uwe DG1KK für diesen spannenden Gastbeitrag, der zeigt, wie sich mit einfachen Mitteln praktische Lösungen für den Amateurfunk umsetzen lassen und gleichzeitig zum eigenen Experimentieren anregt.
🎙️ Gastautoren gesucht
Möchtest auch du über deine Erfahrungen, ein Projekt oder den Besuch einer Amateurfunk-Veranstaltung berichten? Dann schreibe uns gerne eine E-Mail an redaktion@dl-nordwest.com.
Habt ihr etwas vergleichbares bereits selbst realisiert? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unserer Telegram- oder WhatsApp-Gruppe.
Euer Team DL-Nordwest
Hier findet ihr weitere Beiträge:





Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘