Das LinHT beherrscht nun M17 out of the box, sowohl auf Empfangs- als auch auf Sendeseite. Anders als bei den ersten Prototypen müssen dafür keine Befehle mehr per SSH-Terminal eingegeben werden. Einfach einschalten, und nach dem Booten ist man sofort in M17 QRV.
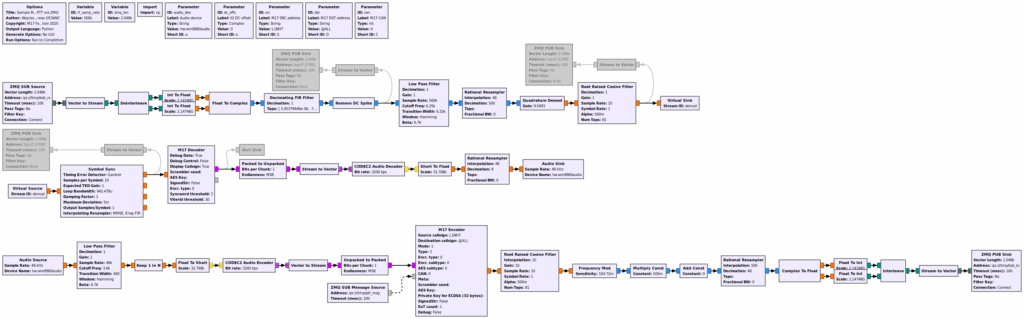
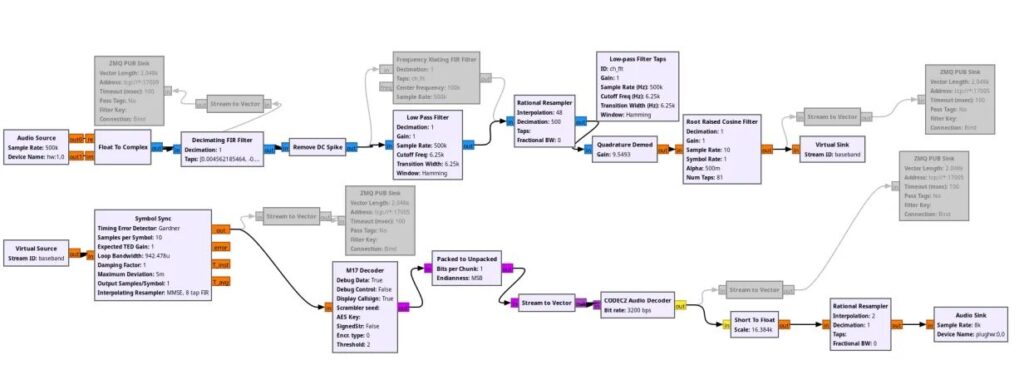
Aktualisierter GNU Radio Flowgraph des LinHT, Quelle: m17project.org
Das M17-Entwicklerteam weist jedoch darauf hin, dass insbesondere im Empfangszweig weiterhin Optimierungspotenzial besteht. Bereits in Arbeit ist die Hardware-Revision B, die unter anderem einen variablen HF-Abschwächer vor dem verwendeten SX1255 vorsieht, um diesen besser vor Übersteuerung zu schützen.
Wer tiefer in die Technik einsteigen möchte, findet alle Details in den aktuellen Blogbeiträgen der M17 Foundation. Ein Demo-Video soll dort ebenfalls in Kürze verfügbar sein. Die Beiträge findet ihr hier und hier.
M17-Protokoll aktualisiert
Auch am Protokoll selbst wurde gearbeitet. Die neue Version 3.0.0 (draft) bringt strukturelle Änderungen mit sich:
Das TYPE-Feld wurde vollständig neu organisiert, inklusive der Entfernung des Packet/Stream-Bits.
Textnachrichten werden nun anders über das META-Feld übertragen, und Padding-Bytes sind auf 0x00 gesetzt.
Zusätzlich wurde ein neuer Pakettyp für TLE-Daten ergänzt.
Wir halten euch bei DL-Nordwest selbstverständlich über alle weiteren Entwicklungen rund um M17 und das LinHT auf dem Laufenden.
Was haltet ihr von den aktuellen Fortschritten beim LinHT? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
LinHT ist ein frei programmierbares Handfunkgerät, das den Amateurfunk neu denken will. Mit Linux-Betriebssystem und offener Hardware bringt es Spielraum für eigene Ideen und neue Betriebsarten.
Mit dem Erscheinen von Geräten wie dem TYT MD380 beziehungsweise dem baugleichen Retevis RT3 hielten erstmals DMR-Handfunkgeräte chinesischer Hersteller Einzug in den Amateurfunkmarkt, die dank ihres günstigen Preises den Einstieg in DMR auch für diejenigen interessant machten, die es selbst einmal ausprobieren wollten. Richtig spannend wurde es jedoch, als, durch die Vorarbeit von Travis Goodspeed KK4VCZ, auch die Modifikation und Erweiterung der Firmware möglich wurde. Damit ließen sich diese Geräte besser an die Bedürfnisse von Funkamateuren anpassen und boten Funktionen, die weit über den ursprünglichen Funktionsumfang hinausgingen.
Auch rein analoge Geräte wie das beliebte Quansheng K5 und dessen Nachfolger lassen sich inzwischen mit modifizierter Firmware betreiben. Durch ihre niedrigen Preise schrecken erfahrene Bastler nicht davor zurück, die Geräte sogar zu zerlegen, die Hardware zu verändern und individuell zu erweitern.
Allen diesen Funkgeräten ist jedoch eines gemeinsam: Ihre begrenzte Rechenleistung setzt der Weiterentwicklung enge Grenzen, insbesondere, wenn es darum geht, neue digitale Betriebsarten zu unterstützen. Und genau hier setzt LinHT an!
LinHT – Open-Source-Funktechnik zum Selbergestalten
LinHT ist ein offenes, modular aufgebautes Handfunkgerät, das als Open-Source-Hardware entwickelt wird. Ziel des Projekts ist es, ein flexibles und zukunftssicheres Funkgerät zu schaffen, das sich sowohl in Hard- als auch in Software frei anpassen lässt. Von Grund auf als Software Defined Transceiver konzipiert, übernimmt ein leistungsfähiges System-on-Module (SoM) unter Linux die gesamte Signalverarbeitung.
Das LinHT verwendet Linux als Betriebssystem, Quelle: m17project.org
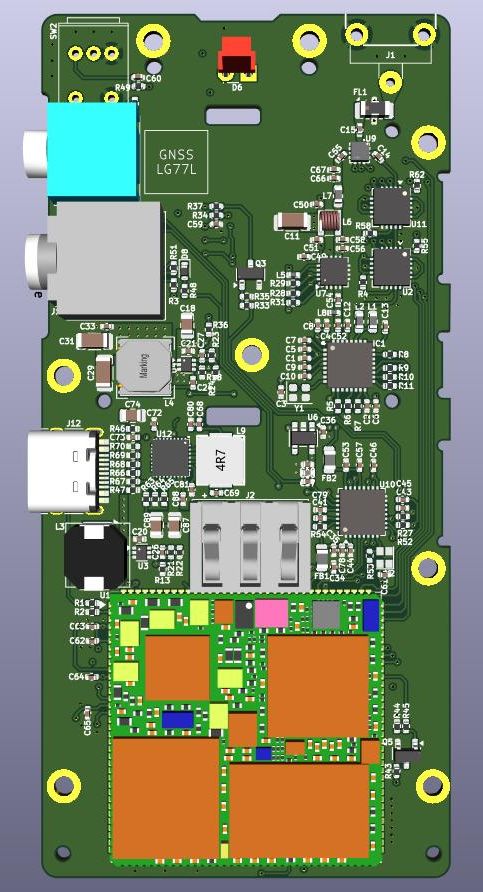
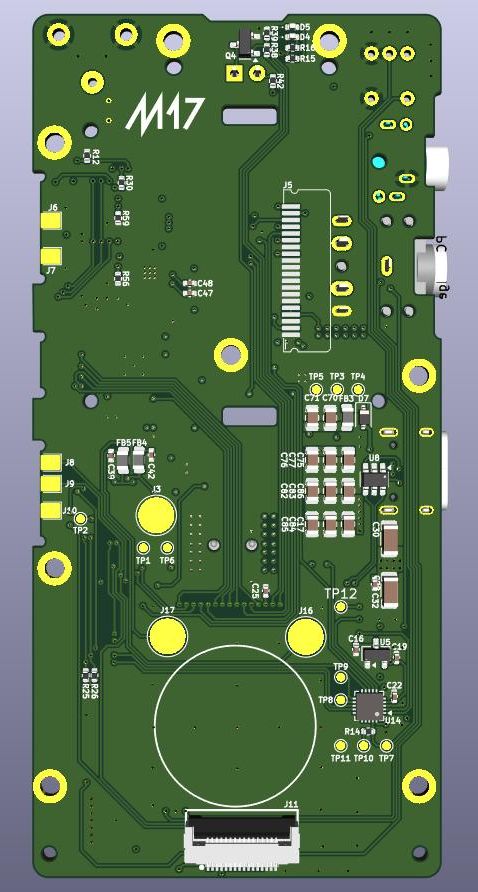
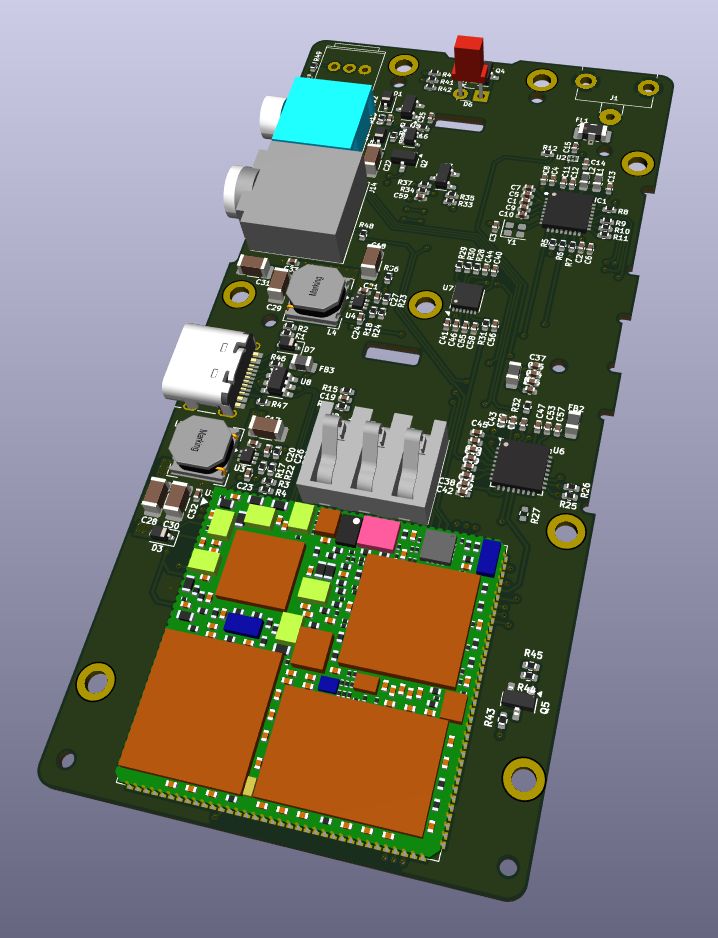
Die Hardware besteht aus einer eigens von Vlastimil OK5VAS entwickelten Hauptplatine, die in das Gehäuse eines handelsüblichen Retevis C62 beziehungsweise Chierda UV58D passt und das originale Chassis, Display und Bedienelemente sowie den Originalakku weiterverwendet.
Von Vlastimil OK5VAS entwickelte Leiterplatte, Quelle: m17project.org
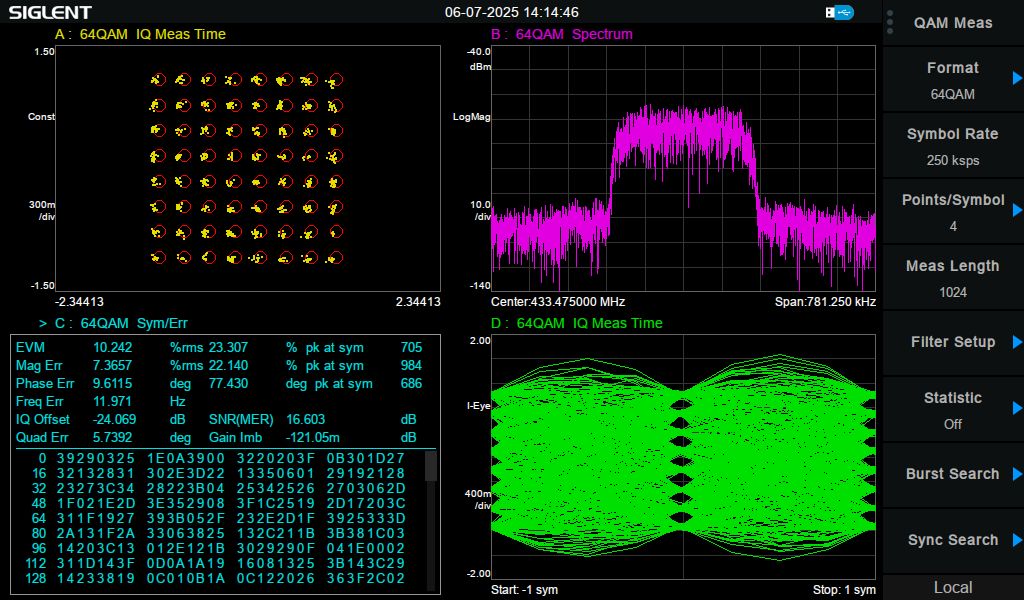
Bereits jetzt beherrscht LinHT den Empfang und die Aussendung von M17-Signalen, zudem wurde der Empfang von TETRA erfolgreich getestet. Sogar eine Testübertragung mit 64QAM bei 1,5 Mbit/s konnte erfolgreich durchgeführt werden.
Erfolgreiche 64QAM Aussendung mit 1,5 Mbit/s, Quelle: m17project.org
Die gesamte Funktionalität wird dabei über GNU Radio Flowgraphs definiert. Entwickler können ihre eigenen Signalverarbeitungsblöcke erstellen und so das Verhalten des Geräts frei gestalten. Möglich macht das ein System-on-Module (SoM) mit Linux, auf das man per USB-C via SSH zugreifen kann. Neue Funktionen lassen sich dadurch einfach aufspielen und sofort nutzen.
LinHT Funktionalitäten werden als GNU Radio Flowgraphs definiert, Quelle: m17project.org
Sogar an künftige Erweiterungen ist gedacht: Das SoM verfügt über eine Neural Processing Unit (NPU) mit TensorFlow-Lite-Unterstützung, die künftig beispielsweise die Sprachdekodierung mit Codec2 verbessern könnte.
Fazit
LinHT ist kein weiteres kommerzielles Funkgerät, sondern eine offene Plattform für Experimente. Es ermöglicht Funkamateuren, neue Betriebsarten auszuprobieren, bestehende Technologien weiterzuentwickeln oder völlig eigene Ideen umzusetzen. Statt an die Grenzen einer fertigen Firmware gebunden zu sein, lässt sich das gesamte Verhalten des Geräts frei programmieren.
Auch wenn auf der diesjährigen M17-Konferenz bereits das Potenzial von LinHT deutlich wurde, steckt das Projekt noch in den Kinderschuhen. Die Hardware ist derzeit (noch) relativ teuer, und zusätzlich wird ein Spenderradio benötigt, um daraus ein vollständiges Handfunkgerät zu machen. Der Einbau der Hauptplatine sowie der Umgang mit den notwendigen (Linux-)Softwaretools dürfte viele Funkamateure zudem vor eine große Hürde stellen.
Trotzdem begrüße ich diese Entwicklung sehr und werde hier auf DL-Nordwest auch weiterhin über den Fortschritt des Projekts berichten. Und wer weiß, vielleicht wird LinHT eines Tages marktreif, und ein Hersteller bringt ein fertiges Gerät mit ausgereifter Firmware auf den Markt, das endlich alle gängigen digitalen Betriebsarten in einem einzigen Handfunkgerät vereint.
Ist LinHT der nächste große Schritt im Amateurfunk, oder doch eher eine spannende Spielerei für Technik-Nerds? Schreibt uns eure Meinung gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
HamClock: Das ultimative Info-Tool für dein Shack. Erfahre in diesem Beitrag alles über die neuen Funktionen und Entwicklungen.
Im Jahr 2020 hatten wir euch die HamClock, entwickelt vom Funkamateur Elwood Downey, WB0OEW, bereits ausführlich vorgestellt. Ihre erste Präsentation feierte Elwood übrigens schon im Oktober 2017 in einem Artikel der QST. Damals haben wir euch die Grundfunktionen gezeigt und erklärt, wie ihr HamClock beispielsweise mit einem Raspberry Pi B+ und einem 7″-Touchscreen aufbauen könnt. Seitdem hat sich einiges getan: Beim Schreiben dieses Artikels liegt HamClock bereits in der Version 4.15 vor.
Wer unseren ursprünglichen Artikel noch einmal nachlesen möchte, findet ihn hier.
Im Folgenden stellen wir euch einige der spannendsten neuen Funktionen vor.
Wichtigste Neuerungen
Neue Kartenstile: Wolken, MUF_RT, Echtzeit-Wetter, Aurora, D-Layer Absorption, Terrain, Länder, Mollweide, Mercator und Robinson.
Unterstützung neuer Protokolle und Verbindungen: Log4OM UDP, N1MM und DXLog UDP, WSJT-X Multicast, rigctld (inkl. –vfo), flrig, hamlib, GPS NMEA und GPSD.
Erweiterte Watchlisten: Für DX Cluster, ADIF, SOTA, POTA – jeweils separat, mit Bearbeitung und Frequenzbereichen, Filtermöglichkeiten gegen ADIF-Dateien.
Planungs- und Prognosetools: Satelliten-Planung (gemeinsame Sichtbarkeit DE/DX), EME-Planung, Sonnen- und Mondmarkierungen, VOACAP Karten, DRAP, Aurora Chancen.
Erweiterte Karten- und Anzeigeoptionen: Mehrere rotierende Hintergrundkarten, Farbeditor für Setup, Graustufen-Darstellung, Anzeige von Sonnen-/Mondposition, rotierende Sammlungen, Maus-Over-Informationen (z.B. Spots, CPU-Temp).
Systemintegration und Steuerung: Rotorsteuerung (auch Long-Path), PTT-Steuerung mit Polling, UDP Logger-Integration, RESTful API-Befehle (set_panzoom, set_rotator, set_title, set_pane u.v.m.), GPIO Steuerungen (für RPi), Unterstützung für bis zu zwei BME280-Sensoren.
Spots und Cluster-Integration: DX Cluster Spots, Reverse Beacon Network, PSKReporter/WSPR-Spots, JTDX/WSJT-X, VE7CC CC Nodes, Spots nach DE oder von DE, farbig markierte Spots, Spotauswahl für Biografie-Links.
Zeit- und Alarmfunktionen: Mehrere Alarme (einmalig, täglich, UTC oder lokal), 24-Stunden Wecker, Countdown-Timer, Anzeige von UTC, JD, MJD, DOY, Solar, Siderisch und UNIX Zeit.
Anzeige von Wetter und Weltraumwetter: DE/DX Wetterdaten, SpcWx Optionen (z.B. DRAP, Aurora automatisch), Solar Flux und Sonnenflecken Verlauf, Magnetosphäre Bz/Bt, Solar Wind, SDO-Fenster mit Anmerkungen.
Diverse Visualisierungen: CPU-Temperatur Verlauf, WiFi RSSI, Solarstatistiken, Satellitenzeiten, Mondphase, Live Spots, Große Uhr analog/digital (mit Optionen), DE/DX Wetter direkt in der Karten oder im Fenster.
Benutzerfreundlichkeit: Speichern/Wiederherstellen von Konfigurationen, Bildschirmposition/-größe speichern, graue Darstellung der Nachtseite abschaltbar, scrollbare und sortierbare Listen (ADIF, Spots), Bedienung per Touch (Web und lokal), Setup für viele individuelle Optionen.
Webschnittstellen und APIs: Live-Web-Verbindungen (auch read-only), RESTful APIs zur Steuerung (z.B. Spots, Karten, Titel und Rotor), Anzeige von öffentlichen/privaten IPs, Web-Kommandos für diverse Datenabfragen (Spots, Space Wx, VOACAP, Config).
Sonstige Funktionen: PTT-Anzeige (ON THE AIR), grafische Verlaufskurven für verschiedene Werte (z.B. DRAP, Solar Flux), Satellitenzeiten und -pfade, Anzeige von Abstand/Richtung zu Cursor, beweglicher Cursor mit Wetter und Standortinfos sowie Unterstützung für britische Einheiten (mi/h, hPa).
Hinweis zur Nutzung der HamClock über einen Webbrowser
Um die HamClock über einen Browser aufzurufen, gehe wie folgt vor:
Ermittle die IP-Adresse des Geräts, auf dem die HamClock installiert ist. Diese wird entweder beim Start der HamClock oder während des Betriebs auf dem Bildschirm angezeigt.
Öffne einen Webbrowser Deiner Wahl, z. B. Google Chrome.
Gib die IP-Adresse zusammen mit dem entsprechenden Port in die Adresszeile des Browsers ein: Für die Live-Ansicht http://<IP-Adresse>:8082/live.html bzw. http://<IP-Adresse>:8081/live.html um über den Browser auch Einstellungen vornehmen zu können
HamClock im Shack: Mein aktuelles Setup
Ich habe meine HamClock inzwischen umgezogen: Zwar läuft sie weiterhin auf einem Raspberry Pi, aber mittlerweile auf einem Raspberry Pi 4 Model B, der an einen 24″-Bildschirm sowie Maus und Tastatur angeschlossen ist. Das sorgt nicht nur für deutlich mehr Übersicht, sondern macht auch die Steuerung viel präziser als über das kleine Touchdisplay, das ich früher genutzt habe.
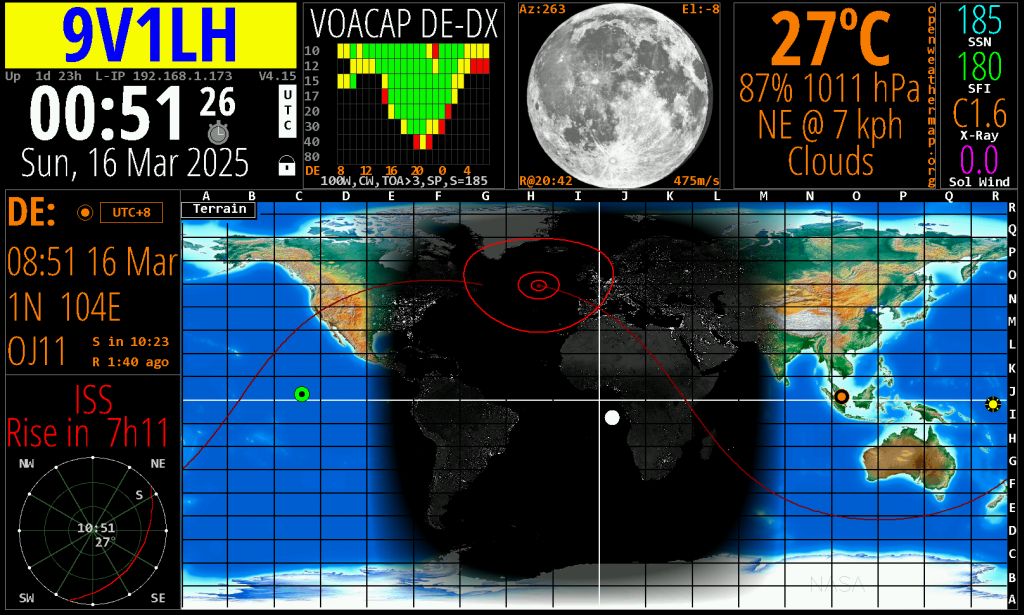
Darstellung der HamClock v4.15 auf einem Monitor. Diese lässt sich umfangreich den eigenen Wünschen anpassen.
Mögliche Umsetzungen der HamClock im eigenen Shack
Wer selbst eine HamClock für sein Shack einrichten möchte, kann diese ganz einfach auf einem bestehenden Computer mit Linux-Betriebssystem installieren. Kleincomputer, insbesondere ARM-basierte Modelle wie der Raspberry Pi, eignen sich aufgrund ihres niedrigen Stromverbrauchs besonders gut – ideal, wenn man die HamClock dauerhaft betreiben möchte.
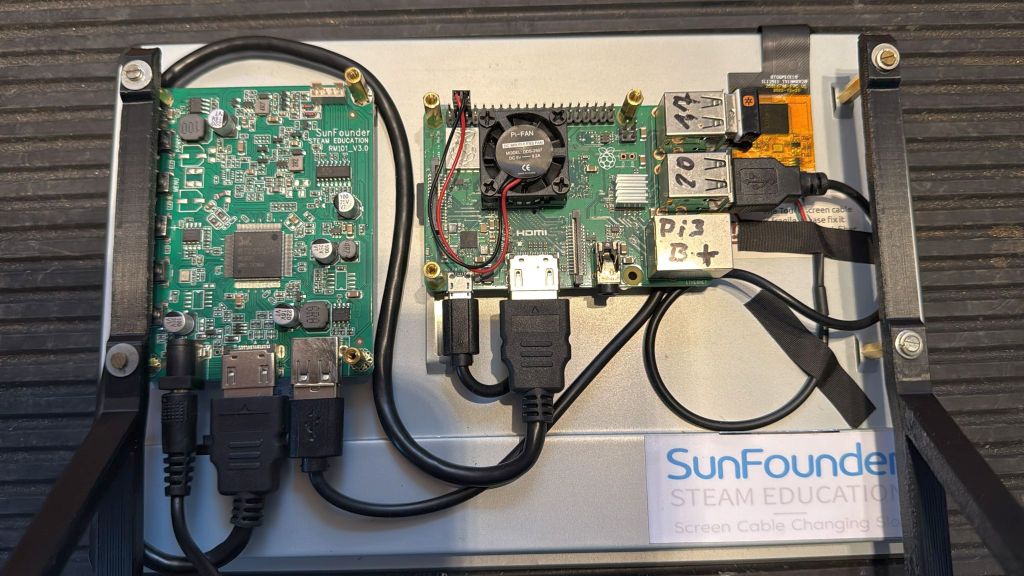
Michael, DL1BO, betreibt seine HamClock mit einem Raspberry Pi 3B+ und einem SunFounder 10,1″ TouchdisplayRückseite des Setups bei Michael, DL1BO
Zu erwähnen ist auch, dass mittlerweile bereits schlüsselfertige Lösungen auf dem Markt erhältlich sind, die man einfach nur noch an die eigenen Bedürfnisse anpassen muss.
Zudem gibt es Installations-Skripte wie 73 Linux von KM4ACK, mit denen sich die HamClock sehr einfach auf einem Linux-Debian-basierten System installieren lässt. Wir werden euch 73 Linux in einem künftigen Beitrag noch im Detail vorstellen.
Auch zahlreiche YouTuber, wie zum Beispiel Arthur DL2ART von Funkwelle, haben das Thema HamClock bereits im Detail vorgestellt.
Leider wird die ESP-basierte Umsetzung mit einem ESP8266 seit der Version 3.10 nicht mehr unterstützt, was bedeutet, dass alle neueren Funktionen in dieser Variante fehlen.
Erweiterungsmöglichkeiten: So kannst du deine HamClock aufrüsten
Durch Zusatzhardware am Raspberry Pi lässt sich die HamClock sogar noch erweitern. So unterstützt sie beispielsweise den Anschluss von bis zu zwei BME280-Sensoren, um Daten wie Temperatur (z.B. im heimischen Shack), Luftdruck und Luftfeuchtigkeit direkt auf dem Display anzuzeigen.
Ein externer Lichtsensor wie der LTR-329 kann außerdem dafür sorgen, dass die Display-Helligkeit automatisch an das Umgebungslicht angepasst wird. Für eine präzise Uhrzeit und Standortdaten kann ein GPS-Empfänger angeschlossen werden.
Darüber hinaus lassen sich mit der HamClock auch externe LEDs ansteuern – etwa für eine „On-Air“-Lampe. Und sogar Transceiver wie der Elecraft KX3 können über die HamClock automatisch auf die Frequenz eines DX-Spots eingestellt werden.
Wie ihr also seht, verbirgt sich hinter dem unscheinbaren Namen HamClock – sinngemäß „Funkamateur-Uhr“ – weit mehr als nur eine Uhr. Wir finden: HamClock ist ein ultimatives Tool, das in keinem Amateurfunk-Shack fehlen sollte. Und das Beste: HamClock ist kostenlos verfügbar und wird kontinuierlich weiterentwickelt. Alle weiteren Informationen zur HamClock findet ihr auf der Webseite des Entwicklers.
HamClock – Offizielle Webseite
Nutz ihr die HamClock bereits? Wenn ja, mit welcher Hardware betreibt ihr sie, welche Funktionen begeistern euch am meisten und welche wünscht ihr euch für die Zukunft? Schreibt eure Erfahrungen gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Aufspielen der Firmware über das USB-Kabelohne Web-Flasher.
Wer eine Meshtastic-Node an einem abgelegenen Standort betreibt und die Firmware aktuell halten möchte, ohne für jedes Update persönlich dorthin fahren zu müssen, findet in der folgenden Lösung eine praktische Alternative.
Damit diese Lösung funktioniert, muss die Meshtastic-Node über ein USB-Datenkabel mit einem Rechner verbunden sein, der per Internet erreichbar ist. In meinem Fall betreibe ich bereits einen OpenWebRX+-Server rund um die Uhr auf einem Raspberry Pi 5, an den ich die Node über ein entsprechendes Datenkabel angeschlossen habe.
Die Kommunikation zwischen dem Linux-Rechner und der Meshtastic-Node erfolgt über eine serielle Schnittstelle. Mithilfe der Meshtastic Python CLI lässt sich die Node darüber nicht nur konfigurieren und fernbedienen, sondern mit dem ESPTOOL auch auf eine neue Firmware aktualisieren.
Wir zeigen euch Schritt für Schritt, wie ihr dabei manuell vorgeht.
Haftungsausschluss
Das Aufspielen der Firmware geschieht auf eigene Verantwortung. Wir übernehmen keine Haftung für Schäden an Hardware, Software oder Daten.
1. Benötigte Software-Pakete installieren
Zunächst verbindet ihr euch per SSH mit dem Host-Rechner, aktualisiert die Paketliste und installiert anschließend die benötigten Softwarepakete.
Falls auf eurem Zielrechner die Python-Umgebung extern verwaltet wird (externally-managed-environment), wie es bei mir mit OpenWebRX+ der Fall ist, solltet ihr zunächst eine neue Python-Umgebung anlegen und aktivieren. Anschließend installiert ihr die Meshtastic CLI und das ESPTOOL innerhalb dieser Umgebung.
Im nächsten Schritt müsst ihr den Port der seriellen Schnittstelle eurer Node auf dem Zielrechner herausfinden. Dazu lassen wir uns mit dem folgenden Befehl zunächst alle zugewiesenen Ports anzeigen.
ls /dev/ttyUSB* /dev/ttyACM*
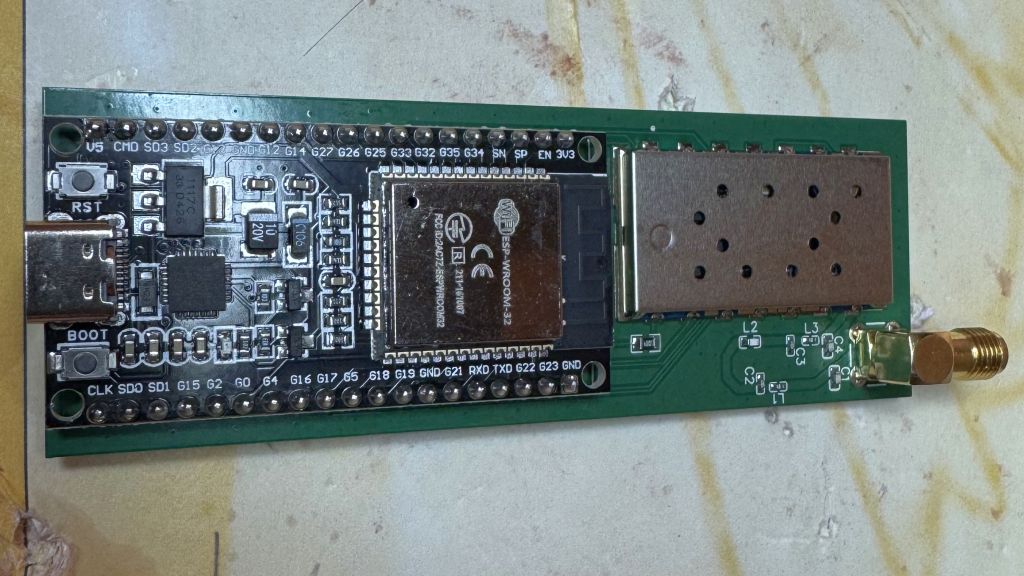
In meinem Fall handelt es sich bei der Node um ein T-LoRa v2.1_1.6.1 von Lilygo, dem der Port ttyACM1 zugewiesen wurde. Bei euch kann die Portnummer jedoch variieren, und je nach Gerät könnte der Port auch beispielsweise ttyUSBx sein.
Lilygo T-LoRa v2.1_1.6.1
Sobald ihr den Port ermittelt habt, fügt ihr euren Nutzer der Gruppe ‚dialout‘ hinzu und gewährt ihm Schreib- und Leserechte für den zuvor ermittelten Port.
sudo usermod -a -G dialout $USER
sudo chmod a+rw /dev/ttyACM1
4. Aktuelle Firmware herunterladen
Nun benötigen wir noch die für euer Gerät passende Firmware. Geht dazu zunächst auf die Seite github.com/meshtastic/firmware/releases und scrollt zu der gewünschten Firmware-Version. Wer nicht unbedingt die neuesten Features benötigt, sondern lieber auf Nummer sicher gehen möchte, ist mit der neuesten Beta-Version gut beraten. Zum Zeitpunkt des Schreibens dieses Artikels handelt es sich dabei um die Version 2.5.20.4c97351 Beta.
Meshtastic Firmware Releases auf Github
In der Sektion ‚Assets‘ der entsprechenden Firmware kopiert ihr nun den für euer Board passenden Link zum ZIP-Archiv, das den Namen ‚firmware-<platform>-<version>.zip‘ trägt. Beim Lilygo T-LoRa v2.1_1.6.1 handelt es sich um ein ESP32-Board, also kopieren wir den Link zur Datei ‚firmware-esp32-2.5.20.4c97351.zip‘.
Ladet euch nun diese Datei in den Homefolder auf eurem Remote-Rechner herunter und entpackt das soeben heruntergeladene Archiv mit:
cd ~
wget https://github.com/meshtastic/firmware/releases/download/v2.5.20.4c97351/firmware-esp32-2.5.20.4c97351.zip
unzip firmware-esp32-2.5.20.4c97351.zip -d firmware-esp32-2.5.20.4c97351
cd firmware-esp32-2.5.20.4c97351
ls -al
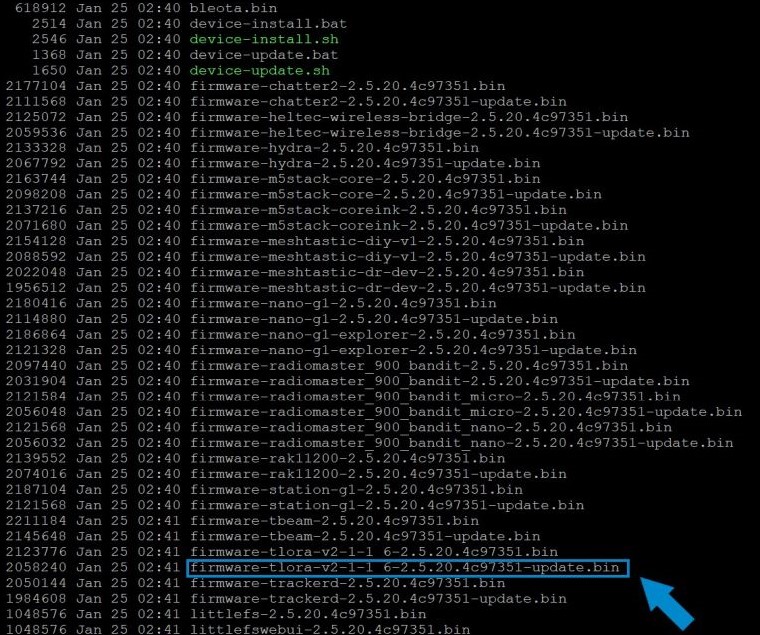
Im Archiv befinden sich verschiedene Binärdateien mit der Endung .bin. Jetzt gilt es, die für euch passende Datei auszuwählen. In meinem Fall möchte ich die Firmware nur aktualisieren, sodass meine Einstellungen auf der Node erhalten bleiben. Daher wähle ich die Datei mit der Endung ‚-update.bin‘. Für das Lilygo T-LoRa v2.1_1.6.1 lautet die richtige Firmware-Datei ‚firmware-tlora-v2-1-1_6-2.5.20.4c97351-update.bin‚.
Das zip-file enthält verschiedene Firmware Dateien. Wählt die zu eurer Hardware passende.
Im nächsten Schritt übertragen wir diese Binärdatei nun auf die Meshtastic-Hardware.
Optional: Node-Einstellungen sichern
Bevor ihr die Firmware auf das Gerät übertragt, könnt ihr optional eure Einstellungen sichern.
Nun starten wir den eigentlichen Vorgang zum Aufspielen der Firmware. Passt die unten stehenden Befehle entsprechend dem von euch ermittelten Port (/dev/ttyXXXN) und der Firmware-Datei (xxx.bin) an.
Wurde der Flashvorgang erfolgreich abgeschlossen, könnt ihr mit dem folgenden Befehl die Versionsnummer eurer Meshtastic-Node auslesen und anzeigen lassen:
Alternative: Komfortables Aufspielen mit Linux-Script
Um diesen Prozess komfortabler zu gestalten, hat der GitHub-User mikcecarper ein Skript geschrieben, das euch mit einem Menü durch die verschiedenen Schritte begleitet. Es übernimmt das Herunterladen und Entpacken der Firmware-Datei sowie das Aufspielen auf euer Board.
Die entsprechenden Dateien sowie eine Anleitung zur Verwendung findet ihr in seinem Repository.
meshfirmware auf Github
In diesem Beitrag haben wir euch Schritt für Schritt gezeigt, wie ihr die Firmware eurer Meshtastic-Node unter Linux direkt im Terminal aufspielen könnt – ganz ohne Web-Flasher. Voraussetzung dafür ist, dass die Node per USB mit einem Linux-Rechner verbunden ist, dieser über eine Internetverbindung verfügt und gegebenenfalls von außen, z. B. per SSH, erreichbar ist.
Der gezeigte Vorgang lässt sich in gleicher Weise auch für andere ESP32-Firmware nutzen, beispielsweise für eine MeshCom-Node.
Viel Erfolg!
Habt ihr Fragen zu unserem Beitrag oder weitere Anregungen? Schreibt sie uns gerne in die Kommentare unter diesem Beitrag oder diskutiert sie mit uns in unsererTelegram- oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Wie du dein Android-Smartphone für einen schmalen Taler in ein Handfunkgerät verwandelst
Die Kombination aus einem Android-Smartphone und einem FM-Funkgerät in einem Gerät ist keine neue Idee – doch bisher war sie oft mit hohen Kosten verbunden. Hinzu kommt, dass Smartphone-Technologie schnell veraltet, und niemand möchte alle zwei Jahre ein teures Gerät ersetzen müssen.
Das kv4p HT wird mit einem Gel-Klebepad direkt rückseitig am Smartphone befestigt
Der Funkamateur Vance Vagell, Rufzeichen KV4P, hat hierfür eine clevere Lösung entwickelt: Ein kleines, erschwingliches Modul auf Basis der beliebten FM-Funkmodule DRA818 oder SA818. Dieses Modul wird direkt an das Smartphone angeschlossen und nutzt dessen Mikrofon, Lautsprecher und Bildschirm, um als vollwertiges Handfunkgerät zu funktionieren.
Vollständig bestückte Leiterplatte
Das Beste daran: Das Projekt ist vollständig Open-Source. Dadurch kann die Community der Funkamateure aktiv an der Weiterentwicklung mitwirken und so das Potenzial dieser innovativen Idee voll ausschöpfen.
Rolf, DL4KR, und ich haben uns dieses spannende Projekt genauer angeschaut und möchten im Folgenden über unsere Erfahrungen berichten.
Zunächst findet man alle benötigten Informationen auf der Webseite von KV4P. Wir haben als Grundlage die neueste Version der Leiterplattendaten heruntergeladen – in unserem Fall die Version 1.7b. Diese Version bietet im Vergleich zu früheren Ausführungen die Möglichkeit, ein HF-Filter-Netzwerk zur Minimierung unerwünschter Oberwellen aufzulöten.
kv4p HT Infoseite
Leiterplattenherstellung
Da die gewählten Komponenten im SMD-Design in Baugröße 0402 sehr klein sind, haben wir uns dazu entschieden, die Bestückung der SMD-Komponenten direkt vom Leiterplattenhersteller durchführen zu lassen. Lediglich die THT-Komponenten – wie das notwendige Mikroprozessor-Board auf Basis eines ESP32, der SMA-Konnektor sowie das Auflöten des FM-Funkmoduls (bei uns ein SA818 in der 1-W-VHF-Version) – haben wir selbst übernommen.
Hinweis zur Bestellung des Funkmoduls
Bei der Wahl des Funkmoduls ist darauf zu achten, dass es kompatibel zum DRA818 ist. Wir haben uns für das SA818S von NiceRF entschieden, da es etwas schnellere Umschaltzeiten bietet.
Die Module sind für unterschiedliche Frequenzbereiche und Ausgangsleistungen erhältlich. Für dieses Projekt benötigt ihr die VHF-Variante. Da im kv4p HT keine aktive Kühlung für das Funkmodul vorgesehen ist, empfehlen wir die Verwendung des 1-Watt-Moduls.
Passende VHF-Funkmodule gibt es u.a. auf Aliexpress
Grundsätzlich hat man die freie Wahl, bei welchem Hersteller man die Leiterplatte fertigen lässt. Wir haben in der Vergangenheit bereits gute Erfahrungen mit JLCPCB gemacht. Sie bieten günstige Preise, schnelle Lieferung und eine hohe Qualität. Allerdings sind dort nicht immer alle benötigten Komponenten auf Lager – so war es auch bei diesem Fall. Daher haben wir uns dieses Mal für PCBWay entschieden. Ein entsprechendes Projekt, das sich direkt in den Warenkorb legen lässt, hat Vance dafür bereits angelegt. So wird der Bestellprozess deutlich vereinfacht.
Nach nur kurzer Zeit waren sowohl die vorbestückte Leiterplatte als auch alle anderen benötigten Komponenten eingetroffen, und die Lötarbeiten konnten beginnen.
Komponenten für das kv4p HT vor dem Zusammenbau
In einem knapp 16-minütigen Video beschreibt Vance den gesamten Prozess detailliert, sodass wir an dieser Stelle nicht weiter darauf eingehen.
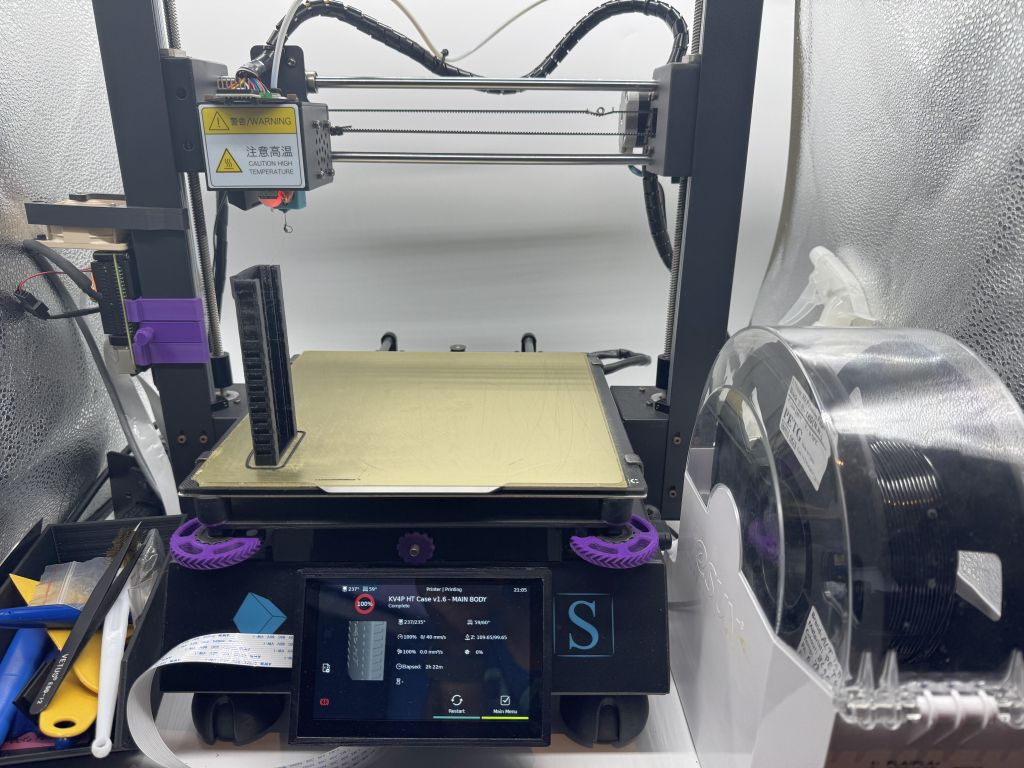
Wer einen 3D-Drucker besitzt oder einen befreundeten OM mit einem solchen kennt, sollte sich gleich das passende Gehäuse ausdrucken. Auf der GitHub-Seite des Projekts stehen dazu verschiedene Designs zur Auswahl.
Ein passendes Gehäuse lässt sich mit einem 3D-Drucker erstellen
Firmware
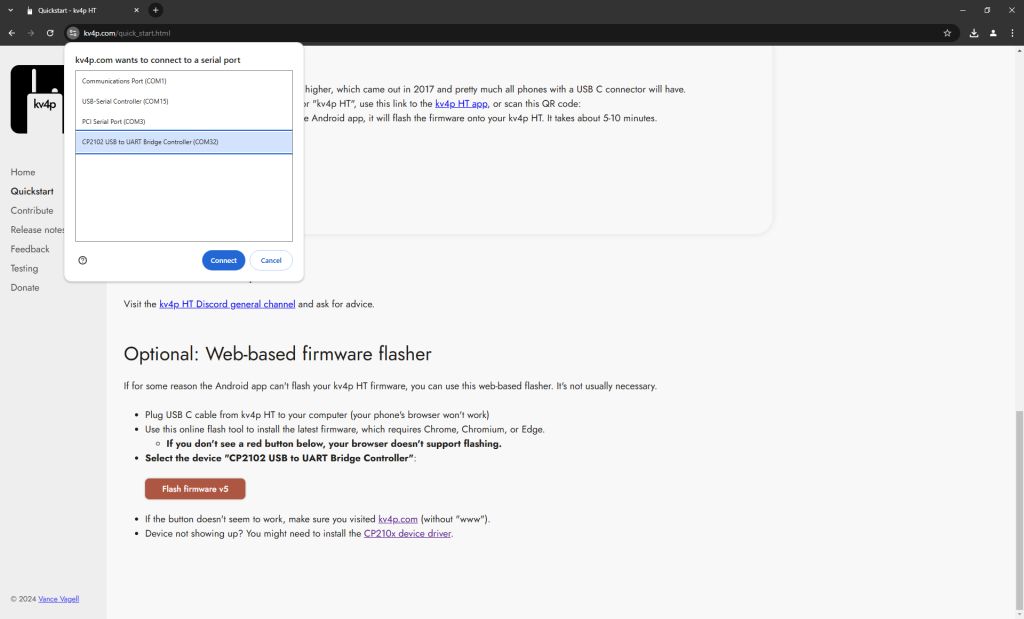
Auch das Aufspielen (Flashen) der Firmware über den Web-Flasher (Quickstart ganz unten) gestaltet sich sehr einfach. Für den Web-Flasher wird ein kompatibler Browser wie Chrome vorausgesetzt. Achtet darauf, dass ihr ein USB-Typ-C-Datenkabel verwendet, damit das ESP32-Board mit dem PC kommunizieren kann. Alternativ kann die Firmware auch direkt mit der Android-App aufgespielt werden. In unserem Fall wurde das Modul jedoch zunächst nicht ordnungsgemäß erkannt. Bei Erscheinen dieses Beitrags liegt die Firmware in der Version 5 vom 30.12.2024 vor.
Web-basiertes Aufspielen der Firmware im Chrome-Browser. Das kv4p HT wird als CP2102 USB-Gerät erkannt.
Mögliche Fehlerquellen
Auch nach dem Aufspielen der Firmware wollte die Android-Anwendung auf unserem Smartphone das kv4p HT einfach nicht erkennen. Uns fiel jedoch auf, dass es durch den von uns bestellten USB-Typ-C-Winkeladapter nicht mit Spannung versorgt wurde. Wir haben daraufhin zunächst kurze Kabeladapter verwendet, um das Problem zu umgehen.
Hinweis zum USB-Typ-C-Winkeladapter
Achtet bei der Bestellung darauf, dass ihr einen OTG-Adapter verwendet. Da das kv4p HT relativ viel Strom benötigt – besonders beim Sendevorgang – empfiehlt sich die Verwendung eines OTG-Adapters mit zusätzlichem Eingang zum Anschluss einer Powerbank.
Passende USB-OTG Adapter gibt es u.a. auf Aliexpress
Ein weiterer Punkt, den es zu beachten gilt, ist, dass die Anwendung bei erstmaliger Ausführung nach Berechtigungen fragt, um auf das angeschlossene USB-Gerät, in unserem Fall das kv4p HT, zugreifen zu dürfen. Diese Berechtigung müsst ihr unbedingt erteilen. Falls ihr die Abfrage nicht erhalten habt oder sie weggeklickt habt, kann es helfen, die Anwendung vollständig zu beenden und zu deinstallieren, dann neu zu installieren und erneut auszuführen.
Aktueller Funktionsumfang
Aktuell ist das kv4p HT nur in einer VHF (2m-Band) Variante erhältlich. Es wird jedoch bereits über eine UHF-Variante nachgedacht. Dabei wäre nicht nur die Bestückung eines anderen Funkmoduls notwendig, sondern auch ein anderes Filternetzwerk sowie eine angepasste Firmware.
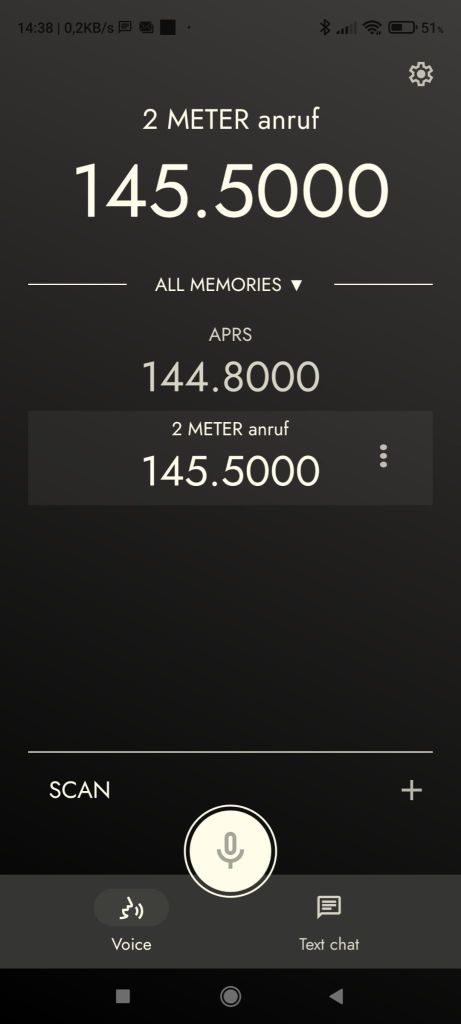
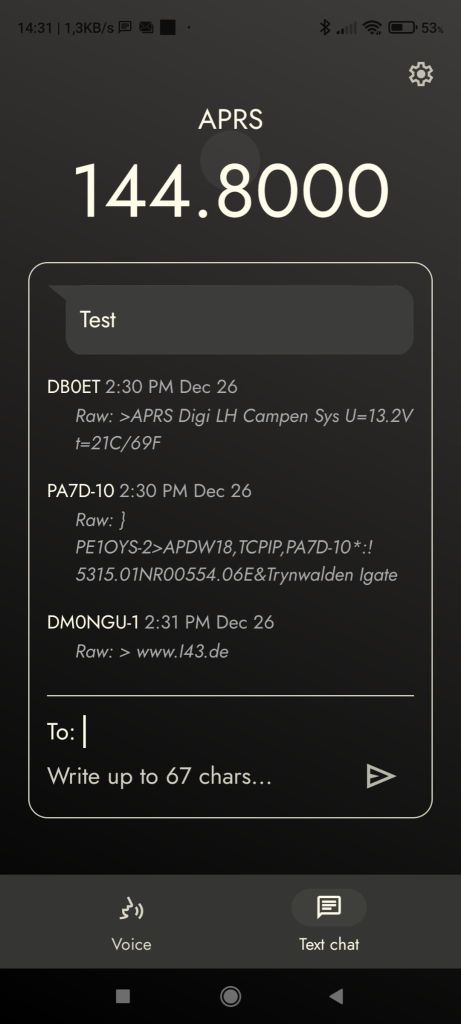
Unterstützt wird nicht nur der FM-Foniebetrieb, sondern auch das Versenden und Empfangen von APRS-Nachrichten sowie Positionsdaten mit 1200 Baud. Die Android-Anwendung bietet zudem Scan-Funktionen und Speicherkanäle, um die Bedienung noch komfortabler zu gestalten.
Auswahl von Speicherkanälen
APRS-Nachrichten Empfang und Versand
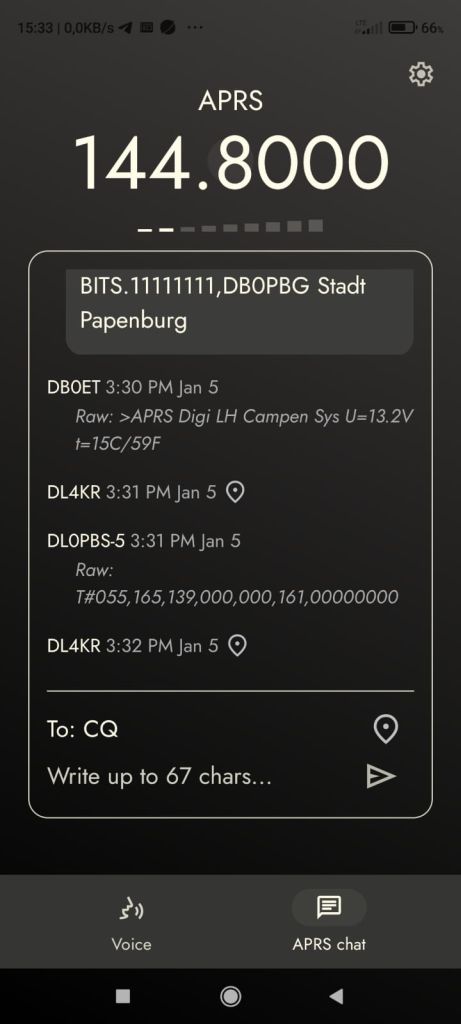
In den Einstellungen wird dazu „Beacon my position“ aktiviert
ESP32 Firmware v5 und die Android App v1.6.0. unterstützt jetzt auch das Aussenden von APRS-Positionsbaken
Zusammenfassung und Ausblick
Auch wenn jeder von uns sicher schon etliche Handfunkgeräte sein Eigen nennt und diese teilweise sogar günstiger zu haben sind als die für das kv4p HT benötigten Komponenten, bietet das Projekt doch einiges an Mehrwert. Besonders spannend wird es, wenn das kv4p HT eine Anbindung an Anwendungen wie RepeaterBook und APRSdroid bietet.
Leider ist das kv4p HT nur zu Android-Smartphones kompatibel. Ich habe jedoch bereits viele Ideen, das günstige Modul zum Beispiel auch unter Linux zu nutzen. So könnte ich mir vorstellen, daraus unter Linux einen kostengünstigen APRS-Digi mit iGate zu realisieren. Eventuell bietet es auch einen Anreiz für Experimente mit der Software GNU Radio.
Der Aufbau und Test des kv4p HT hat uns viel Spaß bereitet und kann besonders als Gemeinschaftsprojekt im eigenen Ortsverband empfohlen werden.
Probiert es selbst aus und werdet Teil der Open-Source-Funk-Gemeinschaft – lasst uns in den Kommentare unter diesen Beitrag oder in unserer Telegram- und oder WhatsApp-Gruppe gerne wissen, welche kreativen Einsatzmöglichkeiten ihr für das kv4p HT findet!
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
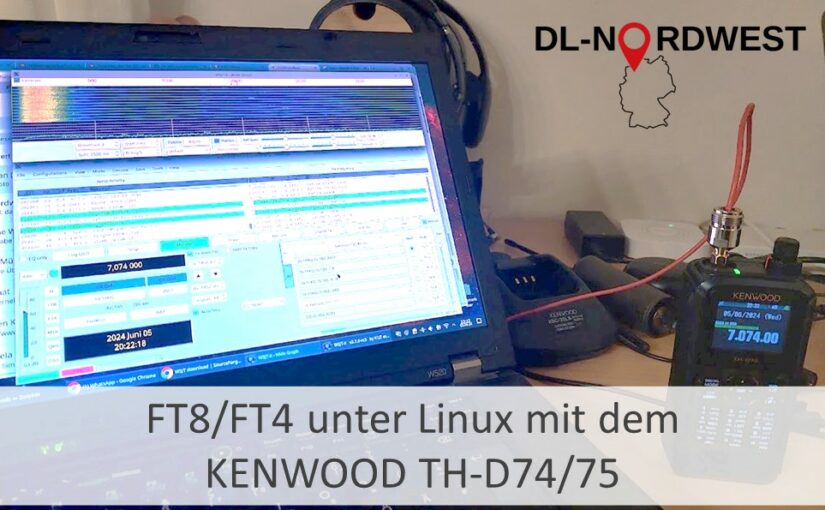
In diesem Beitrag beschreibt Matt. DL1BJL, wie ihr unter Linux mit eurem Kenwood TH-D74 oder TH-D75 digitale Betriebsarten wie FT8 und FT4 auf Kurzwelle empfangen könnt.
Um als UKW-Handfunkbenutzer ohne Kurzwellengerät auch mal digitale Betriebsarten auf Kurzwelle ausprobieren zu können, kann man tatsächlich auch die Handfunke benutzen, wenn die das denn unterstützt. Die Geräte von Kenwood TH-D74 und TH-D75 lassen das auf VFO B zu.
Ich möchte hier kurz die Konfiguration unter Debian / Ubuntu aufzeigen (bei mir Kubuntu 24.04 LTS). Hier kam das TH-D75 zum Einsatz, das TH-D74 sollte genau so funktionieren. Unter Windows funktioniert das ähnlich, ist hier aber nicht Gegenstand.
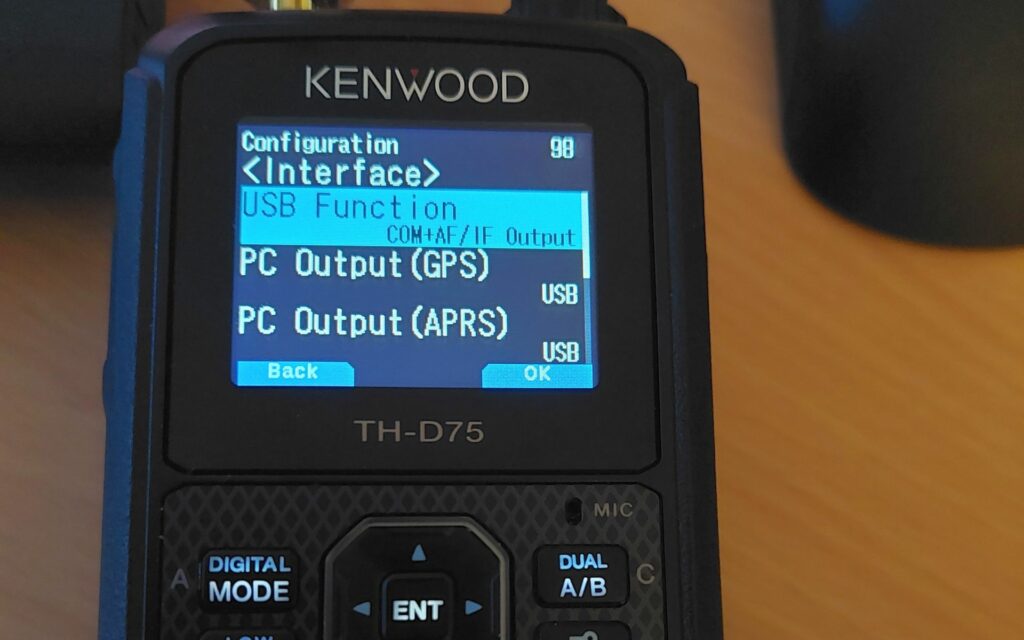
Zuerst muss sichergestellt werden, dass das Gerät nicht als Speichergerät per USB-Kabel mit dem Computer verbunden ist. Das kann man im Menü Nummer 980 nachsehen (COM + AF / IF OUTPUT muss aktiviert sein, das ist aber Standard). Somit lässt sich die Funke per USB steuern und gibt auch Audio per USB aus.
Im Menüpunkt 980 muss COM+AF/IF Output im Unterpunkt USB Function ausgewählt werden
Als nächstes installieren wir die Software. Die Befehle
sudo apt update && sudo apt search wsjtx
aktualisieren die Paketlisten und zeigen, welche WSJTX-Version verfügbar ist. Der Befehl
sudo apt install -y wsjtx
installiert alles, was nötig ist. Anschließend können die Installationspakete mit
sudo apt clean
wieder gelöscht werden, da sie nicht mehr gebraucht werden (die Dateien sind ja installiert).
Alternativ kann auch die JTDX Software benutzt werden, die auf WSJT-X basiert:
sudo apt search jtdx
Die scheint aber nur ab Ubuntu 24.04 „Noble Numbat“ verfügbar zu sein und wurde von der Community weiterentwickelt. Sie ist in meinen Augen komfortabler. Aber das ist sowieso nur von Interesse, wenn man auch senden kann 😉
Jetzt das Programm starten, und über File/Settings konfigurieren:
General kann man konfigurieren, muss man aber nicht. Man sendet ja nicht. „Blank line between decoding periods“ macht aber die Anzeige übersichtlicher.
JTDX Einstellmenü (Setup): Im Reiter „General“ führt die Option „Blank line between decoding periods“ zu einer übersichtlicheren Darstellung
Radio ist wichtig: Zuerst unter „Rig“ Kenwood TH-D74 auswählen. Beim „Serial Port“ muss man ermitteln, wo die Handfunke per USB angeschlossen ist. Dazu auf der Konsole das folgende Kommando eintippen:
sudo ls -l /dev/serial/by-id/
Das wird z.B. „usb-JVCKENWOOD_TH-D75-if00 -> ../../ttyACM0“ liefern oder ttyACM3 oder wie auch immer. ttyACMx wird es sein und die Nummer ist wichtig.
Ermittlung der Com-Port Nummer des TH-D75
Im Tab Radio dann entweder bei „Serial Port“ in der Auswahlliste den Port auswählen oder selbst eintippen: /dev/ttyACMx, wobei x mit dem Port ersetzt wird.
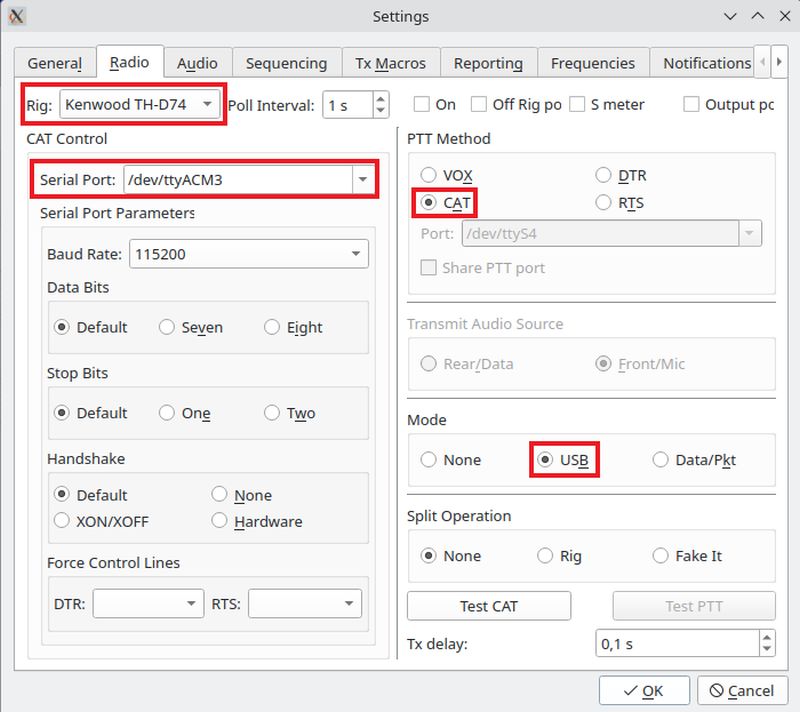
Bei „PTT Method“ wählen wir CAT, weil das die Funke unterstützt und unter Mode USB, den Rest belassen wir so.
JTDX Einstellmenü (Setup): Im Reiter „Radio“ unter „Serial Port“ wird der ermittelte Com-Port des TH-D75 eingetragen
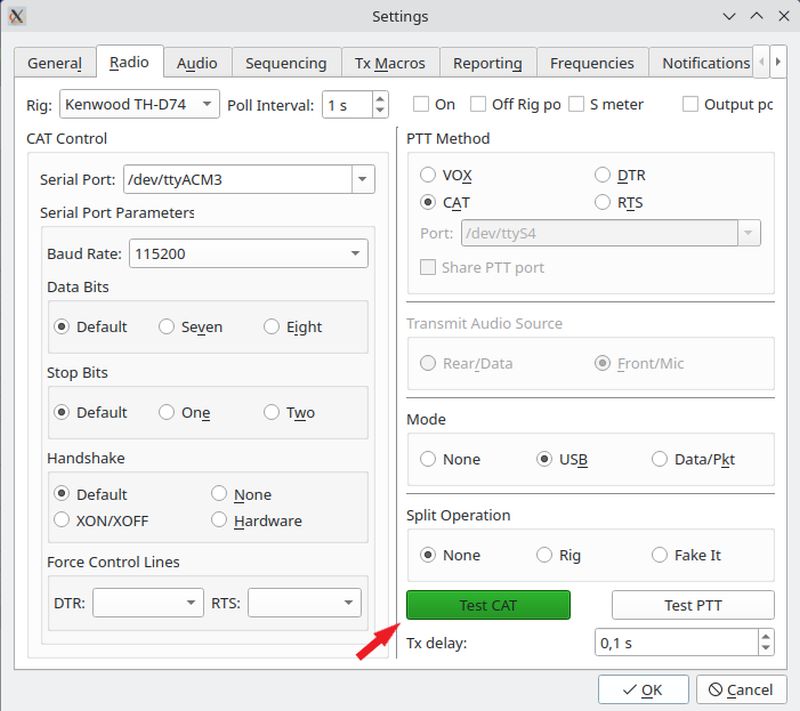
An dieser Stelle kontrolliert bitte noch einmal, dass am Funkgerät VFO B ausgewählt ist und nicht etwa ein Speicherkanal. Jetzt drücken wir den Button „Test CAT“ und der sollte grün werden. Wenn nicht, ist etwas falsch und wir müssen das korrigieren. War er grün, bestätigen wir mit „Ok„. Bitte an dieser Stelle auch noch einmal schauen, ob das der Empfangsmodus des Funkgerätes durch die Software auf USB gestellt wurde. Falls nicht müsst ihr diese Einstellung selbst vornehmen.
JTDX Einstellmenü (Setup): Die Verbindung sollte mit „Test CAT“ im Reiter „Radio“ geprüft werden
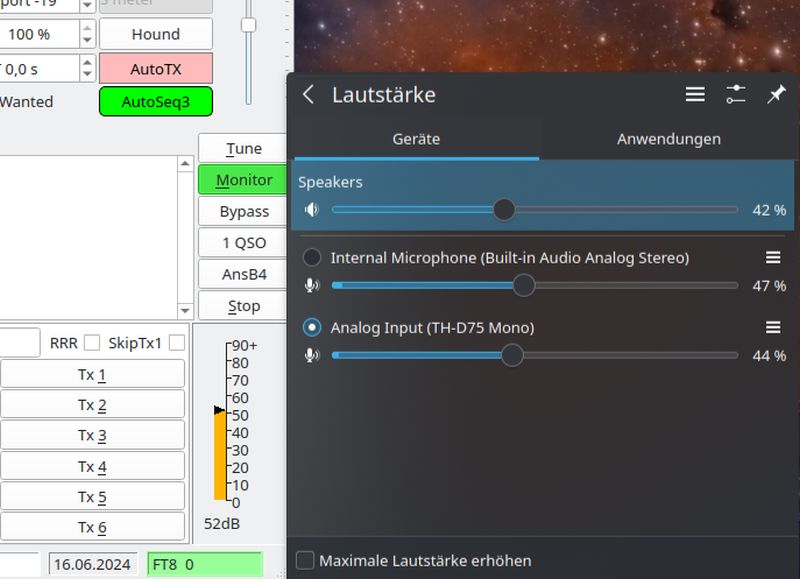
Nun muss noch der Audio-Pegel am PC angepasst werden. Die Handfunke sollte als Mikrofon erkannt worden sein und der Pegel im Programm so angepasst werden, dass etwa 50 dB erzielt werden (bei WSJT-X links unten, muss grün sein / bei JTDX rechts unten, sieht orange-farbend aus).
Einstellung der Lautstärkeregler am Beispiel KDE. Das TH-D75 dient hier als Signalquelle.
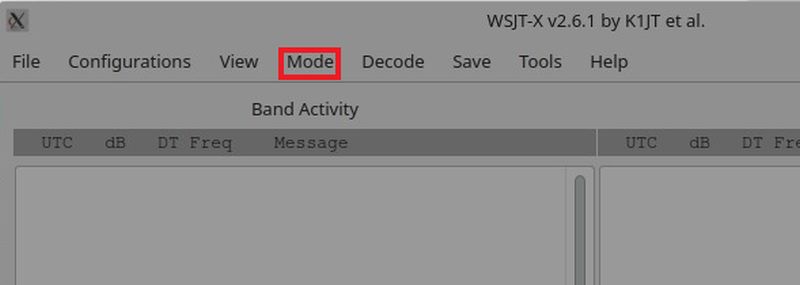
Jetzt wählt ihr noch die gewünschte Betriebsart aus, also z.B. FT8. Bei WSJT-X ist das der 4. Menüpunkt (File/Configurations/View/Mode…), bei JTDX der 3. (File/View/Mode…).
Auswahl der gewünschten Betriebsart in WSJT-X
Nun sollte man schon die ersten decodierten Rufzeichen sehen. Wichtig: Die Zeit muss synchron sein! Das sollte unter Linux kein Problem sein. Überprüfen kann man das unter http://time.is.
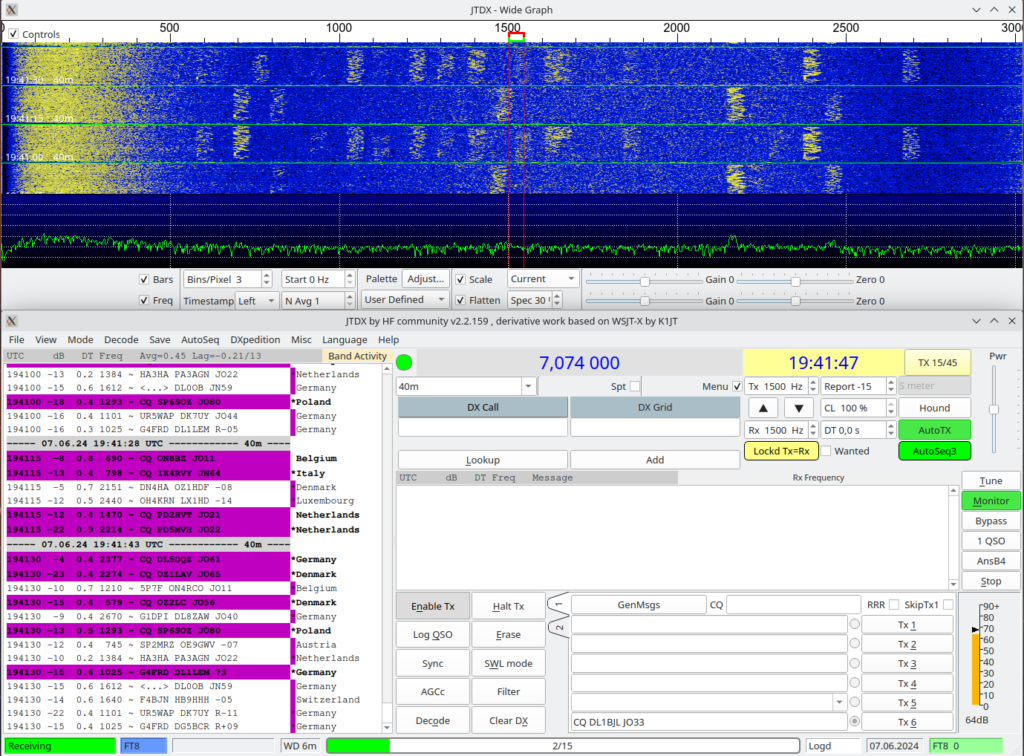
Anwendungsfenster von JTDX
Achja: Die interne Antenne („Bar antenna“) sollte über Menü 104 auf „ANT Connector“ umgestellt werden. Als Antenne reichte bei mir abends ein 3 m langer Draht am SMA-Anschluss, um die Anzeige wie im Bild zu erzeugen.
Viel Spaß beim Experimentieren, 73 de DL1BJL Matt.
Hast du auch bereits andere Betriebsarten mit deinem TH-D74/75 getestet? Hast du weitere Themen, die du wie Matt. DL1BJL gerne in einem Gastbeitrag mit uns teilen würdest. Schreibt es uns gerne in die Kommentare unter diesem Beitrag oder diskutiert es mit uns in unserer Telegram- und oder WhatsApp-Gruppe.
Möchtest du das DL-Nordwest Projekt unterstützen? Dann freuen wir uns über deinen Gastbeitrag, das Teilen unserer Inhalte oder eine (kleine) Spende 🤑 Vielen Dank für deine Unterstützung! 😘
Einwilligung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Einwillligung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Präferenzen
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.